Search the Community
Showing results for tags 'Technic'.
Found 1584 results
-
Finally got this book, figured it was about time and worth the investment after struggling with a few, (alot), of unfinished projects. It just showed up today, and if anyone else knows of helpful books please let me know. I'm back to sponge mode.....
-

42163 Wall-E - alternate build [free MOC]
Timorzelorzworz posted a topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Meet Wall-E, an alternative build for Lego Technic 42163 Heavy-Duty Bulldozer Wall-E is a B-model for available set 42163 Heavy-Duty Bulldozer (no additional parts needed) Wall-E can drive smoothly on tracks and rotate his head around Wall-E can actually grab things (waste included) with his moveable arms and transport them Wall-E has free instructions to build by yourself Wall-E wishes you alot of fun building and playing Free Instructions available for this model! Follow link to rebrickable -

MOC Liebherr EC-B flat top tower crane
gvo25 posted a topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Hello all, I would like to present my latest creation, a Liebherr ECB flat top tower crane. Since the advent of the lunar earth sun orbit technic set, I saw immediate use of the base wheels and the grey rings. I always wanted to do a tower crane but never got around to do it. So now it became a reality. I did had to order a load of liftarms to make the the tower, and I ordered the 3X19 frames in dark blue grey. The build went rather smoothly, and resulted in a compact and more or less stable design, also using of a substantial amount of ballast weight in the base of the crane and in the boom counter ballast. Only the tensioning of the trolley wires was a real pain, also to make the system small enough to fit in the boom. It's still not quite perfect, but I'm happy with it. The crane measures 110cm in height and 135cm total length, the crane uses 2 transverse L-motors and 1 m-motor, and a powered up battery box. Example of the real crane My rendition: some close-ups: The Boom can be more or less easily dissassembled into 3 pieces, as well as the tower, and the counter boom can also easily dissassemble The counter ballast box has also 300g of bearing balls and the box is free hanging and easily removable with a mobile crane The grey boxes contain each 400g of small bearing balls as ballast. Rigidity of the tower is a bit of a problem, it suffers from a lot of torsion when the crane is slewing, the whole boom assembly is quite heavy. The cam half liftarm pieces allow for precise levelling of the boom Some small videos: Hope you liked it, comments are always welcome greetings -

[MOC] Case QuadTrac 620 & Elmer HaulMaster 2000
mktechniccreations posted a topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Hello guys, few days ago i finished and released my latest MOC. And here i want to share it with you and it a bit more technical aspect of it. if you are interested. (My english may have few errors) Main one is the tractor, as you can see its Case QuadTrac 620 articulated tractor, aimed for 1:17 to match with trucks and other farm machinery, mainly eric´s if there is collector who appreciate that. but this scale is also big enought to pack everything needed and look good, and small enough for not needing large uniform boring surfaces. On the outside it may look like pure system thing, but on the inside its packs 6 PF motors. two of which are L motors for drive, 3x M motors, two for sariel.pl pneu/switch combo (two independend systems) and third is in the rear of the body for PTO output. and last is standard servo which uses opposide steering rack system for quick response in oposite of standard linear acctuators, this system is in my opinion even more compact, reliable and more enjoyable to play with. However if exposed to very large resistance it may throw timing off. (i dont recomend steering while stationary on carpet or floor). Secondary features are : Connected steering wheel to the servo system while the cabin itself has suspension. Driver seat is rotatable to the right side as the original. left staircase swings away from the path of tracks while being steered to the left. and full suspension on all 4 tracks and also rotating rear section for compenstate for uneaven surfaces. Everything is powered by 2x buwizz 2.0 bricks. It may seems like an overkill for instructions but i chose to not make too much compromises. i wante model that can do it all, exept it cant lift things because its lack of three point hitch. About the trailer. Its mostly System bricks and creator style creation with minimum of technic features so i will not talk much about it, but it has three functions. first is PTO input which powers conveyor on the floor of the bin and it also diverts into auger conveyor to spin worm gear at the end to look like there is actual function to it. However it cant move real stuff. Second function is pneumatic support leg at the bottom, so after attaching it to the tractor with pin and connecting all the hoses. you can remotely operate entire trailer. Third feature is extending auger conveyor to simulate real operation of this kind of machine. I am aware of few off-scale bug on this model. main one is taller track system due to including suspension. and shorter trailer bin. If you are interested in instructions they are on my RB profile: https://rebrickable.com/users/Klein.Creations/mocs/ There is one independent video review and one video of my own. i hope you will appriciate and enjoy both of them. -
[MOC] 42154 Dodge Viper GTS (1996) - alternate build
Timorzelorzworz posted a topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Hello Eurobrickers, let me allow to share a new creation with some insights made from LEGO Technic set 42154 Ford GT as an alternate build. The idea behind When the 42154 Ford GT came out with its inventory in March 2023, I was impressed by the earth blue colour and had immediately a Lamborghini Lanzador in mind to build with this pieces. I was sure that this model is doable with the given parts, but unfortunately this vehicle is an upcoming electronic car with no engine. Skip the engine and functionality only for design? Nope, not this time so I decided not to make this model and was working on some sketches for a Koenigsegg Gemera instead but that car did not convinced me at all so I decided to finally skip (pause) 42154. To be honest, I found the inventory of the set very special with many odd part numbers, but was impressed by the large amount of connectors used and blue axle pins and also red 2L axles. In February 2024, I stumbled over pictures of the Dodge Viper GTS in second generation, manufactured since 1996 and directly felt in love with this car. To reuse the headlight parts and white parts for stripes seems to be a good option and I finally got keen with the inventory of the 42154 set to make first sketches. In the beginning of March 2024, the project for the Dodge Viper was official born and the finished model ends up with impressive 1430 parts used only from the set 42154 Ford GT. Model features 1:11 scale HoG linkage-steering suspension in front and back engine with moving pistons openable doors on both sides realistic openable hood with lock detailed interior measures 41cm x 18cm x 11.5cm Model impressions Model details Both doors of the model can be opened to see the interior. Pedals are made for the driver with existing parts. The car is controlled from the back with a knob that is responsible for steering the front wheels with a linkage system. The hood opens up to 60 degrees and can be locked to safely stay in position while playing and displaying the model... ...and easily unlocked to close. Opening the hood reveals the engine that is driven directly by the rear wheels through differential. As common for B-model compromises and limited parts, this Dodge Viper uses (only) a V6-engine under the hood instead a V10 - sorry folks. It was very hard to fit all the functionality (engine + steering + suspension) under the hood in tiny space, but everything works well as suspected. Made with DieCast For the first time I used a Diecast-model and also many pictures from it. Here are some pictures for comparison: If you like what you see, feel free to support my work and to build your own Dodge Viper from your 42154 donor set. Instructions and more info can be found here Happy building! -
Rubber Band Sizes
diegobaca posted a topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Hi Forum, Wanted to get the official word out there regarding rubber band sizes. For the past year I have been purchasing parts from Bricklink (in order to build all Lego Technic Sets). One of the part types I see a lot of inconsistency buying are rubber bands (especially rubber bands for older sets). For example, I have purchased rubber band part: x264 from five different vendors and I have received inconsistent sizes. Some seem to have sent me x137 instead of x264, but I am not really sure. Now I am really confused, and want to get your guys opinion about rubber band sizes and what is considered official (to the best of people's knowledge). I have attached a picture of what I believe are all the sizes used on Lego Technic sets. Let me know if I am missing any rubber band sizes or if these are incorrect. I wonder if x264 is the same as x137 and there are natural size variations? Thank you everyone for their input! -
4x4 Raid Buggy V2 with 2-speed Gearbox and BuWizz motors
Another Brick in the World posted a topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Hello again, Back in March 2023 I started my YouTube channel with my Raid Buggy. Granted, it look somewhat crude and it was quite slow, but it was my first model with BuWizz motors and bricks so it has a special place my heart. Recently it was the 1 year anniversary of it, and I decided to make a remake of it to prove some how much my LEGO building skills have changed and to honor the original model and channel. So enough with the backstory, let's get to the details: Features 4 Wheel drive with a 2-speed gearbox steering with double steering racks Soft double-wishbone suspension Working gear stick Bodywork built to resemble the original model One of the things that I wanted to show with this model was that you don't necessarily need 4+ BuWizz motors in order to make a good fast off-roader. For this, I decided to make use of a 2-speed gearbox, which has a low gear with the same gearing as the Raid Buggy V1 and the high gear which is some 67% faster (6.2 km/h). The gearbox design was heavily based off @Zerobricks's excellent Simple Off Roader but modified to fit my needs. Another benefit of this is that it has a neutral gear, which is very useful for downhills. From then, I finished it off with the axles of my Monstermog and the chassis was done! from there, I had to build the bodywork, the part that I had been dreading the most For me the body was a very important part, as I wanted to make it reminiscent of the original yet it would have a more sporty look and a stronger construction. Just like the first model, it uses many connectors in @Attika's characteristic style. In the end, the bodywork suffered many changes but I consider them for the better, as it now has a more imposing look and a much more sturdy connection so it can be rolled over without having to fear of breaking it. And now a few more images: The model ended-up being a very good off-roader, with a somewhat high speed (6.2 km/h) yet with some torque left for harder off-road. I pretty much had no issues with it, except the front open differential which sometimes got in the way when off-roading in the low gear. It's otherwise a model more focused on high-speed on uneven terrain so I'm happy with it If you would like to build this model, you can download the .io file at rebrickable here. And as always, here's a YouTube video containing some off-road footage, functions showcase, and some nice Punk Rock music Feel free to post a comment about what are your thoughts about it, and see you in the next one! -

Benny's Space Mech
CheungsLegoCreation posted a topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Hi all, Long time no post ;) And here's my latest powered up based mech, utilising 2 technic hubs and 8 motors. 3 motors are used for walking and turning, 1 motor is for raising the arms and moving the antenna, the rest of the motors are for arms movement. Compare to my previous bot, this bot features wider feet, allowing the mech to walk with less body tilt. I hope you will enjoy watching the video. If you have any question about it ask away :) Take care and happy building. Cheung :) -

(WIP Thread) Manta's MOCs
Mantarri posted a topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Thought I'd create a thread to just post WIPs of my MOCs, or neat mechanisms. Finished: Generic Muscle Car -

[MOC] 42167 skip loader truck
TechnicMOCer posted a topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
My alternative model of 42167 Mack LR set - skip loader truck. It features HOG steering and detachable container which can be loaded/unloaded. -

42161 Lamborghini Huracán Tecnica
R0Sch posted a topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Discussion thread for the upcoming LEGO Technic 42161 Lamborghini Huracán Tecnica. Nr. of pieces: 806 Release date: 01.08.2023 Price: 52.99€ Lime again, how boring. -

[MOC] [WIP] 42122 Technic Jeep Rubicon Remake/Upgrade
Fluwoeb posted a topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Hello everyone, This is Evan here with my first Eurobricks topic! I decided as soon as I obtained the 42122 Technic Jeep Rubicon set to massively upgrade it (similar to what y'all did here, here, and here). The only difference is that I am starting from scratch and rebuilding the whole vehicle based on the original set to not only be more functionally proficient (which is the focus of this venture), but also to look a little bit more aesthetically appealing;) As per my preference, I will start with the functionality. Since everyone else put the differentials in the axles, I decided at first to take a different route and take them out of the axles and instead put them in the cabin. See the following pictures of the front axle: Maybe this idea will work for you in a different project, but I quickly found out that it would not work for my MOC after making a few test chassis assemblies. By displacing the differentials from the axles to the center of the vehicle greatly increases the area that the drivetrain takes up in the cabin of the Jeep, so I decided to go with the differentials in the axles. As you can already see, I went with the CV joints for the steering drive connections just like Zerobricks did. However, I decided to go with the mustang wheels to center the steering pivot more. Also, I added Ackerman geometry to the steering system out of necessity. See the following pictures: I used this piece to connect the steering gear to the axle frame with the gear that drives the differential. It works quite well. Also, the steering rack is held in place by the actual "U" technic frame. Please let me know what you think of it so far, I will continue to update it until I finish it! -
Lego Mini Jeep Wrangler 1:15 MOC
dpi2000 posted a topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Mini Truck Model 8, Jeep Wrangler 1:15.No play Lego in over half a year, now 'Jeep' coming...At the same time,I would pay respects to Madoca.L motor +new wheel hubs, BuWizz normal.Infomations:L28xW14.5xH15cm, Weight: 970G,Still, simple and good playability, like RC, like real Jeep. instructions for free: https://rebrickable.com/mocs/MOC-79593/dpi2000/lego-mini-truck-wrangler-115-moc/#detailsThanks, again! Trial video This chassis part was built last year. -
Hello Eurobricks community! Let me introduce my latest MOC - Hummer H1 out of Lego pieces. It has approx 3800 parts, incl 7 Motors. Functions are: - Independent suspension of all wheels - 3 RC differentials like in the real model - 8 Cylinder engine - module build - easy removable hood and body. - 4 L motors for drive- Servo for steering- M motor for the winch- L Motor for diffs lock VIDEO: All photos: https://bricksafe.com/pages/Aleh/mercedes_770/hummer_instructions To start this model I was inspired of two things: 1) This video 2) Humvee from CADA Most wanted render: Building instructions are available: https://rebrickable.com/mocs/MOC-174585/OleJka/hummer-h1/#details
-
40505 - Building Systems (LEGO House exclusive set for 2024)
R0Sch posted a topic in Special LEGO Themes
This year's LEGO House exclusive set will be a microscale diorama representing the 3 main LEGO building systems Duplo, System and Technic. The diorama's depict the sets 810 Town Plan (1961), 853 Car Chassis (1977) and 2705 Passenger Train (1983). On the backside there is a Vault-like display shelf with 20 more micro builds of other iconic sets from LEGO's history. The color scheme is kept classic. Set Nr.: 40505 Name: LEGO Building Systems Part count: 1211 Nr. of minifigures: none Size: 48 x 24 studs (38.5 cm x 19.2 cm), ~11 bricks tall Age rating: 10+ Price: 699 DKK (~94€) Release date: 29.02/ 01.03.2024 Availability: exclusive to the LEGO House Store -
[WIP] A novel 3D printed Lego mini motor for the PF system
896gerard posted a topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
For long, I've wanted a small strong mini Lego Technic motor, smaller than an M-motor. As I recently learnt how to draw Lego parts and had the opportunity to use 3D printed nylon (using laser sintering) , I decided to try a small motor as well. As the PU motor stuff is getting big and heavy, this is my response: a small easy-mountable motor with a case of only 5 by 2 by 2 studs. 70% of the motors in Lego Technic models don't have to be large. Only the mount of this tiny motor is 2x3 studs. The mount is tailor made for Technic applications: if you build often with M-motors you will know that an M-motor always must be connected to a 1L beam to ensure that the gears won't slip and to mount the M motor securely. The mount design of this new motor eliminates the need for the beam, so that's one stud saved already. Because the motor is only 2 studs wide, 3 mini motors can be in the space of 2 M-motors. Also, 3 mini motors take up the space of one XL motor.. The exterior design is derived from a PF M-motor, because I like the design and want to keep using the PF looks. This is still a work in progress as I need to mount a 9V connector and insert the inner electric motor(already in stock here). I also need to do some more painting and sanding. Nonetheless, the printed parts are quite accurate. I will give an update soon when the motor is working. The motor gets internal electrics that work up to 12V so also third party remote control bricks will be allowed to use their boost modes. My big hope is that TLG understands that we need small motors and remotes, not big ones. The length of 5 studs makes this motor very easy to put in all kinds of leftover spaces. Thanks for reading. I'm open to design improvements! -

[MOC] Audi R8 Quattro - B model for Peugeot 42156
Cardboy posted a topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
This is a B model for the Peugeot 42156. I have wanted to make an Audi R8 for a while and with all the grey pieces from this set I thought it could be possible. It was a nice challenge to try and create the Audi shape from limited parts of the Peugeot. And I hope I have captured the major features of the R8. I have had to simulate the 4-wheel drive as the two differentials spin at different speeds and to prevent damage to the pieces I have placed a pin connector as a fake differential. You can steer the car via the steering wheel and HOG steering, the latter can also be removed for a cleaner look for the model. Due to part availability, I have chosen a street race concept with carbon fibre bonnet/hood and roof, with large rear spoiler. I know the R8 is a V10 but I hope you forgive me for a V6 The doors can be opened, and the bonnet/hood can be lifted to see the suspension. This is my first time creating a B model and I hope you like the results. The instruction can be found here: Audi R8 Quattro - B model for Peugeot 42156 Features and Functions: · opening doors, bonnet/hood · independent suspension · HOG steering · 4-wheel drive I think the area around the engine could be a better angle but I didn't have enough long beams left I think the front is not too bad. -

[WIP] MCI D4500CT Commuter Coach
JLiu15 posted a topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Last year, I built a MOC of the NJ Transit New Flyer XD60 Articulated Bus. That model was a huge success, so back in August I started working on another bus model: the NJ Transit 2016-2022 MCI D4500CT Commuter Coach. I anticipate this model having a lot more functionality than my XD60 model. There will be 6 motorized functions total, 4 of which are controlled via a 4-output distribution gearbox. The model will use Control+ electronics, with a single hub powering 4 motors (1 C+ XL for drive and 3 C+ L for steering, gearbox functions and gearbox switching). The 4 motorized functions controlled via the gearbox will be opening/closing the passenger door, extending/retracting the wheelchair lift, raising/lowering the wheelchair lift, and opening/closing the wheelchair door. The model will also feature suspension on all axles. I believe the real MCI D4500CT have independent front and tag axles and a solid driven axle (not 100% sure), but a such a setup might be too complicated so I went with a live axle suspension on all axles. I also plan to include a model of the Cummins X12 engine with mini pistons, which can be removed from the chassis as the pistons won't be visible when the engine model is inside the bus. Only the 2020-2022 (plus a handful of 2019) models have the Cummins X12 engine (previous years had the Cummins ISX12 engine), so my model will be of a 2020 or newer unit, most likely 2021 as the 2021 order was by far the largest. I started designing the model in Stud.io shortly after BrickFair VA back in August, focusing primarily on the chassis. The biggest challenge was making sure the wheelchair lift can fully extend/retract from the chassis and not interfere with any other mechanisms. The wheelchair lift's transverse range of motion takes up almost the entire width of the bus, so it was difficult making sure I can squeeze all the functionality in there without compromising on looks. Making sure I had the space to fit everything was also a challenge, as the distribution gearbox and Control+ hub both take up a lot of space. I have a preliminary version of the chassis modeled in Stud.io, and have begun building the physical model. The chassis is a very dense build, with plenty of mechanisms running through it. I also have the "stainless steel" side panels (all metallic silver - definitely won't be cheap) and seats in place in the Stud.io model. The Stud.io model is already over 4000 pieces, so I think this model will easily surpass the part count of my XD60 model. Just like my XD60 model, because I am modeling it in Stud.io, I plan to publish instructions for this MOC when it's finished. I've included some photos of the physical model as of right now (I mostly just have the gearbox section done), and some screenshots of the Stud.io model showing its progress since August. Photos: -
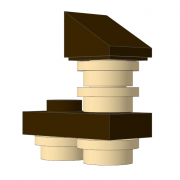
Today I started a new model. I'll build it mainly using light bluish grey Technic parts. Here's a first sketch to plan Bricklink order:
-
(1).thumb.png.b4d6c907fe73903aec1adfd3cd481a19.png)
Lego quadruped Arduino? (glowy)
glowytheglowbug posted a topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
my first time using arduino and geekservo, not much experience in C but have experience with python I'm planning on making a 8dof rc walker with an arduino that can object detect with 2 ultrasonic sensors /distance sensors, 2 motors per leg hopefully can work made prototype out of only lego and coded with pybricks -
[WIP] Lifted Truck with 3 steering modes
JLiu15 posted a topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
With my Ripsaw Tank MOC essentially done by now (just waiting for some final pieces to arrive) and my PAB order for my New Flyer XD60 articulated bus model still yet to arrive (with more pieces coming for that), I've decided to start another MOC in the meantime. This will be my second model combining Control+ and Robot Inventor after my Heavy Duty Skid-steer Loader. It will have two identical axles, each with a steering motor (medium angular motor) to control steering, and thanks to their absolute positioning feature I don't think I'll have to calibrate it every time, like on e.g. the 42099 set. I was originally planning to use Control+ L motors for the steering, and have this be a Control+ MOC, but found the medium angular motor to fit better with the absolute positioning being another plus. I plan on creating a control profile in the Mindstorms app with different sliders for normal, crab, and 4-wheel steering modes. The drivetrain consists of heavy-duty differentials and planetary hubs, so this eliminates the need for significant gearing down inside the chassis. For propulsion, I plan to use 2 Control+ XL motors, with a fake engine driven by a separate motor. This way, the fake engine can run at all times and there will be less friction in the drivetrain. I anticipate building the chassis to be pretty straightforward, as the entire chassis is essentially a mirror image with two identical axles. As for the bodywork, I'm leaning towards a red car-like body. If so, I will probably name this MOC "Red Beryl C", where "C" is for Crawler. It would be the third model in my Red Beryl series, after my Red Beryl GT of 2018 and Red Beryl X of 2019. Let me know what you think, and any suggestions you may have. Photos: The front axle, with planetary hubs, long shock absorbers, and a medium angular motor for steering: The front axle, with the wheels attached. Note that this is the underside, with the heavy-duty differential visible: -
30682 - NASA Mars Rover Perseverance
R0Sch posted a topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
This little polybag deserves it's own topic. Let's continue to show our love for the Technic polybags. May their reign never end! Set nr.: 30682 Name: NASA Mars Rover Perseverance Parts: 83 Age: 7+ Price: 3.99 Euro Release date / availability: 01.01.2024 / limited retail Number of functions: plenty (worm gear driven arm, rocker-bogie suspension, adjustable arm and drill head, rotating camera head) First review: Brickset First digital model: 30682.io -

MOCs versus sets
PlopiNinetySix posted a topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Hey everyone, I got this kinda question floating around my head now and felt like it could have a discussion here. Which Technic sets, in your opinion/s, are the closet to similar MOC counterparts, or even better? Basically, which LT sets are so good/well-designed/excellent/awesome [and other superlatives alike], that these could potentially reach the standard/s of a MOC? *I have to note here that all MOCs (of some vehicle/machine) vary in standards, designs and functions, so this question might be a bit ambiguous Some of mine would be 42145, 42114, 42043. -
Hello All!! I'm very happy to share my latest Technic supercar design, the BMW M4 GT3! I spent the entire summer working on the chassis, trying to make use of the new Ferrari Daytona parts (rims, differential, panels) to create a fast RC design with full turning capability and full speed. My latest design, the 1:7.5 BMW M4 GT3! by lachlan cameron, on Flickr This build features 5 different suspension ride heights, 3 of which have torsion bar suspension, full RC drive and steering with working steering wheel and lights, manual option with HOG, door locks, opening hood truck and doors, inline 6 engine. BMW M4 GT3 by lachlan cameron, on Flickr I wanted the suspension to have an easily adjusted height, something that can be switched on the fly, and to be able to create a racecar stance, lower at the front and taller at the rear, all while being fully functional in RC mode for each height. My latest design, the 1:7.5 BMW M4 GT3! by lachlan cameron, on Flickr The new differential allows minimal friction, allowing this car to hit a very comfortable speed with 1 buwizz and 2 buggy motors. The steering is very nimble with full turn capability, and even more so with Andrea's brand new design - custom create rims that actually remove the brake disk from Lego and use his own designed hubs to sink the deep disk rim inward, while still providing functionality to the RC drivability thru the u-joints. My latest design, the 1:7.5 BMW M4 GT3! by lachlan cameron, on Flickr @snakeeyes_friex designed the livery, this man can design without boundaries. Honored he could help with this model and all the hard work. Thats all for now... more photos to come! Enjoy! My latest design, the 1:7.5 BMW M4 GT3! by lachlan cameron, on Flickr My latest design, the 1:7.5 BMW M4 GT3! by lachlan cameron, on Flickr Motor options - Buwizz 2.0 or 3.0, old motors / new motors by lachlan cameron, on Flickr My latest design, the 1:7.5 BMW M4 GT3! by lachlan cameron, on Flickr My latest design, the 1:7.5 BMW M4 GT3! by lachlan cameron, on Flickr My latest design, the 1:7.5 BMW M4 GT3! by lachlan cameron, on Flickr
-

[MOC] Benz-Unimog 4×4 Off-road RV
dls7223685 posted a topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Hello everyone, this is the latest work from MTC: Benz-Unimog 4×4 Off-road RV Designed by Muen 1. Function Description ① XL×2:providing power ② Servo×1:steering ③ M×1:2-speed gearbox shift ④ M×3:3 differential locks for front, middle and rear ⑤ SBrick×2 ⑥ Small battery box ×1 ⑦Yellow hard spring ×8 2. Appearance "Modularity" is a design concept that runs through the design of the car from start to finish. From the exterior to the interior, I have modularized all the parts as much as possible, with the obvious benefit that it is very easy to assemble and disassemble, and no longer afraid of transportation. At the same time, each model is clearly positioned before it is designed, which determines the tendencies and trade-offs when designing. The positioning of this car is mainly to do my best to restore the appearance and rich interior of the real car, so this car uses technic parts to build the chassis, and particle parts to build the appearance and interior. The following are photos of the whole car's appearance, and according to the real car's beautiful pictures taken at the same angle, please enjoy. 3. Interior I always think that the interior of an RV is a very important part, so in the process of designing this car, it can be said that the design of the interior took up half of the focus and energy. Another important reason why I personally like RVs is the various storage spaces, which can be a storage space in places you don't expect, so I also built more storage spaces when designing the interior. The following is a detailed introduction to the interior of this car, I hope you can enjoy it. (1)Cab ① Seats The design of the seats uses #99563 to shape the unevenness of the surface, while the base under each seat consists of four #4532 for additional storage space. Behind the front seats are shelf baskets and in-car video for rear passengers to use and provide entertainment during the drive. ② Central Console I divided the center console into two parts, front and rear. For the front center console, there are several storage spaces with three drink holders. At the same time, there is a shift lever, handbrake and a number of function control buttons set up on the side near the main driver. And the side near the passenger side is the air conditioning vents. For the rear center console, a number of storage space and drink placement that must be the regular configuration, front and side air vents and air conditioning adjustment knob. There is a small clock in the middle for the rear passengers to see the time, but also equipped with a blue satellite phone, we all know that the wilderness places or satellite phone more reliable. Here are photos of the combination of the front and rear master consoles (2)Living area The living area is also designed with rich interiors and "modular". There are two main purposes, one is to facilitate the display of the interior, because my first off-road RV work "Conqueror F", in the process of display found that the interior can not be well displayed. the second is to allow the weight of the car to be reduced during the driving process. So the interior of the living area is very easy to remove as a whole. The interior of the rear compartment consists of 9 main parts, let me introduce them one by one below ① Kitchen Due to the limited space, the kitchen is all open, I personally divided it into 3 sections. First is the lower area, which is a variety of storage space for dishes, I also placed a garbage can, specifically for food waste. The second is the middle area, where the cooking is done, the left is the sink, the right is the stove, most RV's kitchen stove is covered, this is no exception. A variety of pots and pans as well as a wealth of spices hanging on the wall, and a range hood directly above the stove. Finally, there is the upper area with a blue microwave oven and two storage spaces. ②Bar I personally like the bar very much, so I also designed a bar in this RV, mainly for making various desserts and beverages during the rest of the day in the car. The lower half of the bar has 2 levels of storage space, mainly for cups and unopened drinks. The upper part is mainly for a small number of commonly used cups and 2 desserts that have just been made, and there is also a beverage machine with 4 different drinks. These 4 drinks are: orange - Fanta; red - Coke; green - Sprite; blue - Mizone. ③ Left side of the entrance door This module consists of three parts. The lower part is a fire extinguisher. In case there is a fire in the process of parking rest or entertainment outside the car, you can get the fire extinguisher nearby at the first time. In the middle is a white fridge, close to the kitchen and bar for easy cooking. The upper part is a small open storage space. ④ Right side of the entrance door This module is also composed of 3 parts, the lower part is a two-layer shoe rack, placed at the door, in and out of the door is convenient to change and put shoes. In the middle is a small storage space, which is mainly used to place umbrellas to prevent rain from touching the wetland board; There are also two hooks for hanging hats. The upper part is the switch box, the whole living area power switch, there is a specific instrument to show the real-time data of the living area electricity. ⑤ Sofa This car is equipped with two large electric sofa, placed opposite, sofa side armrest has adjustment knob and small display screen. Among them, the sofa near the side of the bed, the bottom is installed with a slide rail, moving the sofa, can enter the storage room under the bed. A sliding rail is installed at the bottom of the sofa to facilitate horizontal movement. ⑥ Table There is a table in the middle of the sofa. To expand the limited space, the table can be folded. After the table is folded, flowers can be placed on the table to beautify the interior environment. ⑦ Storage room The living area has 2 large storage units, mainly distributed under the bed. One is the common storage room, mainly placed washing machine, cleaning tools, repair tools and other common items; The other is a hidden storage unit behind the sofa, which can be accessed by moving the sofa and is used for infrequent items such as suitcases. ⑧ Toilet The toilet is equipped with a toilet that can also be used for bathing. There is a hot and cold water sign and a toiletries basket in the corner. ⑨ TV set The TV set is placed above the sofa and facing the bed, so that whether you rest on the sofa or in bed, you can watch TV programs and relax. Finally, a panoramic view of the living area! 4. Some Details (1)Where is the battery box hidden? (2)The living area tank is located below the rear door (3)Where is the spare oil drum hidden? (4)For parking rest and picnic outside the car, there is a foldable table on the back of the door of the living area, and it is equipped with a storage box (5)Because the car chassis is higher, so the left side of the staircase is designed with handrails, when entering the living area, convenient borrowing; There is a clock on the top of the handle, which is mainly convenient to check the time when taking a rest outside the car or having a picnic (6)The shoe rack is by the door (7)A fire extinguisher is placed in the back of the cab. (8)Skylights in the living area can be opened (9)It's 2023, car phone holder must have! Convenient map navigation! Finally! Hope you enjoy it! Thanks for browsing! Benz-Unimog 4×4 Off-road RV From MTC·By Muen·For Gap.Li


