Search the Community
Showing results for tags '1:10'.
Found 11 results
-

1:10 Scale Motorized Acura/Honda NSX Supercar
Zerobricks posted a topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
After building the 1:8 scale Spano GTA, I wanted to make something more compact, yet even more functional for the BuWizz camp 2021, which got postopned to 2022. The rules behind this model stated to build a 1:10 scale representation of a real existing car, which has to have a working gearbox, fake engine and working steering wheel. After researching different types of super and hypercars, I chose the Acura/Honda NSX since it had several good pros compared to the more famous brands like Ferrari or Lamborghini: The real car has a smaller profile, which means a lower weight It uses a hybrid AWD system, which would come in handy for the LEGO model for accelerating and braking on all wheels Engine powering is a V6, which doesn't take as much space as the typical V8, V10 or even V12 Since it's a less known supercar, my LEGO version could be the first one in such scale I used a simillar technique as with Spano GTA where I imported the 3D model into the Lego Digital Designer and used it as a 3D reference. Using this technique I ended up with a really close representation, and it really shows: As you can see in the gif above, not only does the model look very good, it's also full of functionality: 4x BuWizz motors for driving All wheel drive 2 Speed gearbox Working fake V6 coupled directly to the drive motors Working steering wheel 2x BuWizz 3.0 for control Double wishbone suspension on all wheels Dimensions and weight ended up as following: Length: 45 cm Width: 20 cm (without mirrors) Height: 12.5 cm Weight: cca 1,5 kg Here is how the model's underside looks like, drive motors are driving two independent gearboxes in order to evenly spread the mechanical load. This kind of a setup also cancels out any side forces on the central drive axle, thereby reducing friction and wear: In order to cram all the powertrain components in the rear the drive motors are placed in a V shape. This way there is just enough space between them for a functional V6 engine and a PU medium motor which switches the gearbox: Thanks to the compact powerline and driveline, the interrior is very spacious and both seats are almost 1:8 scale sized, measuring 6 studs wide. There are even stoppers and interrior details on the doors themselves: ž The end performance of the model is higher than what I expected, there is enough torque to freespin all 4 wheels, jump over ramps and top speed in high gear is almost 20 km/h! You can see how well it performs the video: To conclude, this is my first 1:10 scale supercar which also ended up extremely compact, functional, robust and good looking. I also think a 1:10 scale may be beneficial when it comes to reliability and robustness, since models tend to weight half the weight of their 1:8 counterparts while still incorporating a simillar level of functionality and details. Having said that, this will not be my last 1:10 supercar and I think for the next one I will ditch the gearbox and simply drive the wheels directly from the motors without any weak differentials. -
1:10 Large - scale motorized 4x4 Tow truck
Zerobricks posted a topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
I don't usually post my work projects here, but every so often there is a special one that I really want to showcase more in detail. Today I want to show you one of my all-time favourite projects, which is packed both full of functionality and a very high level of detail. Before we go into the details, lets' first let's talk about the idea behind it. We (the BuWizz team) have been cooperating with Slovenian AMZS (Slovenian Automobile Association) for a while now and they are the ones who allow us to record the various speed breaking and such events on their polygon. An idea emerged for a project to design and loose replica of their existing Tow Truck which is to be used for education purposes. Here's how one of their tow truck looks like: I decided to use this specific model as an inspiration of my representation and here were the basic starting functions and features: 1:10 scale Capable of lifting and towing an actual 1:10 model like 42125 All Wheel drive Working gearbox Realistic suspension Highly detailed As with most of my projects, i first started working in LDD and this is what the first prototype looked like: I took some liberty with the shape, notably I removed the crew compartment in order to better the lift arm details. As the project progressed, so did the amount of functions, features and details until I ended up with this long list: Motorized with 11 motors Powered by 2 BuWizz 3.0 Pro bricks All wheel drive powered by 4 BuWizz motors Working gearbox with a high and low gear 3 differential locks Independent suspension in the front Solid rear axle in the back which uses 3x13 curved panels as leaf springs Working V8 engine connected to the drive motors Functioning steering wheel linked to the steering rack Motorized lift which can unfold, raise and lock onto thr wheels of the towed vehicle A motorized winch in the rear Working front LED lights Opening doors, hood and compartments Detailed engine bay with battery, air filter and washer fluid Compartments filled with details such as fuel canisters and various tools Other details include cones and fire extinguishers 3D printed braking discs in the front for show Total piece count is around 3060 parts Just over 3 kilograms 51 cm x 24 cm x 22 cm when folded excluding mirrors Capable of lifting and towing a 1:10 scale car like 42125 even up a steep hill Top speed of 10 km/h Here's an overview of the model and the basic mechanical functions: Driveline is powered by 4 BuWizz motors. The motors drive a 2 speed gearbox and a fake V8 engine: Gearbox is powered by a PU M motor and uses 2 mini linear actuators to switch between low, neutral and high gear: Each of the 3 differentials has it's own lock, actuated by a wave selector and powered by a PU M motor: Steering system is powered by a PU L motor and uses two steering racks in order to both steer the wheels and turn the steering wheel: Finally, there are several more PU M motors used to power the rear arm. The main actuators lift the whole arm and are powered by 1 PU M motor: Another PU M motor is used to unfold the lower part of the lift arm using 2 mini linear actuators: Finally another PU L motor is used to lock the wheels with two more mini linear actuators. The driveline is designed in such way that the arm can swing a bit while cornering: The lifting arm had to be designed to be as strong as possible, yet thin enough to slide under the car we want to tow. The final version was under 2 studs high and capable of lifting a 2 kilogram heavy model with ease: With all the details finalized and the parts omptimized in the LDD version, it was time to build the real deal: As mentioned above, the model is full of details that can be accessed by opening the various compartments: The rear view showing the folded tow arm and the 2 large actuators used to lift it: Few more pictures of the model next to the real deal: Of course no Technic photoshoot wouldn't be complete with the most important photo of them all, the underside: The underside was left open and exposed intentionally, so that the gearbox, the differential locks and steering system can be observed. Of course as with all the projects, this one also had some issues, the biggest being the use of 3x11 curved panels as the rear leaf springs. Originally only a single pair was used to support the weight in the rear and the additional load of a towing vehicle, but it soon proved too much for them and over time they ended up breaking. That is why for the final fix, they were doubled, to increase the stiffness and durabilty of the rear axle: Other than this, there were no other major issues with the model. The driveline has yet to skip a gear, the joints are holding (even the small CV joint used in the front left side) and the model ended up being robust enough for some really rough driving. As mentioned at the start of the topic, this is one of my best models to date, I'm really happy with the amount of sheer functionality, features and details I managed to cram in it and it will forever hold a special place in my heart. To wrap up this already long topic, here's a couple of videos of it in action: -
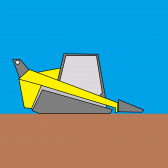
My new model will be something quite unusual. To begin, I would like to say a little word about Ken Block. After revolutionizing what’s possible with a car and cameras, including rallyes, snow board and more – he passed away in a snowmobile accident at the very beginning of the year. This model will rather be a tribute than the representation of the car that he was to drive at Pikes Peak this year... The origin of the project Back to July 2022, I was contacted by WeBrick. They asked me if I could build a model using their parts. They provide adaptable LEGO parts, and their main advantages are the number of available colors (no limitations contrary to LEGO, for instance due to the few colors for mudguards) and the cheap price. This is why I accepted: it was an opportunity to create a model that I could’t have imagined with LEGO parts. I could choose any color and avoid all the color issues that you meet when you build with LEGO parts. Furthermore, it was possible to bring a MOC that is not more expensive than the equivalent LEGO sets, whereas usually, MOCs are way more expensive than sets. I won’t add more details about WeBrick, because this is not the main subject of this topic. I thought it was necessary to quickly explain why I accepted to build a model with non-LEGO parts and why I chose to reproduce the Hoonipigasus. So please, if you have any questions or remarks related to WeBrick, contact me by private message or by social media to keep this thread about my model. And you know what? There's even a 100% LEGO version! Choice of the model My model had to be built around these two main aspects: A never seen color An affordable price for a nice looking and functionnal model This led me to the Hoonipigasus in 1:10 scale (1:11 to be exact because the wheels are huge). The aim was simple: do better than LEGO’s 1:10 scale models. Eventhough the Porsche and the Ferrari have got a pleasant design for a low less high price than the 1:8 supercars, they are missing interesting functions. I wanted to provide a design at least as good as these cars, but with more interesting features. My model includes: Steering with return to the steering wheel and a HOG Openable doors and trunks F1-type suspension 4-speed sequential gearbox Here is the result: Design The most important thing I understood about design is that what looks best is when the panels are placed in the simplest manner, so the result looks simple. But it isn’t. That’s what I noticed on the Predator and the 1:8 Porsche of LEGO: everything looks simple, without angles between the panels, but this looks really nice. I tried to do the same thing on my model, with parts tilted around one axis at most. I longly wondered how I would replicate the mudguards. The real car was widened a lot, and the mudguards have got a really low profile, making impossible the use of LEGO mudguards. Flex only would have resulted in a too empty result, and I was afraid that using flex + beams would look too heavy. But finally, flex and beams look fine. On the rear, I even succeded in reproducing the slight inclination of the sides thanks to the use of 3x11 panels slightly pushing the mudguards on the exterior! https://live.staticflickr.com/65535/52626681965_a4ea88c804_b.jpg[/img] And a lot of stickers to make the design as faithful as possible! LEGO Version A few details change compared to the WeBrick version (12L flex instead of 14L, no rear headlights), otherwise they are identical. Steering The system is simple, you can see the pictures of the 3D model below. The steering can be controlled using the HOG as well as the steering wheel. However, there is a little defect: if you move the car backwards using the HOG, a gear of the transmission may slightly touch a bush, producing some noise. This could easily be fixed by removing the HOG, but to me, the pros of the HOG beat the cons. Openings The doors and a panel of the front trunk can be opened, while the rear trunk can be removed to see the rear suspension. F1-type suspension The original car features a pushrod suspension. I wanted to reproduce the system, while having something reliable. And with space constraints. I can tell you that I spent hours and hours making messed up prototypes! It was necessary that everything worked in compression and not in traction. Because suspensions like on LEGO’s F1s work well when the model was just assembled, but after some time, nothing works anymore: there are too important constrainsts on the ball joints and the connectors. Also, I had to get a geometry allowig a perfect height of the car. That’s all, I think I summarized the issues quite well! Gearbox Due to space limits, it’s a 4-speed gearbox, with a paddle shifter. The shifter is almost exactly the one of Lego Technic Mastery. On the WeBrick version, it doesn’t work as well as the LEGO version if you take the paddles from the upper part. The 3L axles tend to bend the holes of the liftarms, so you have to be careful and take the paddles by at least the middle. But on the LEGO version, no issue. Et voilà! Other pictures of the 100% LEGO version : To finish, the video ! Each model has got around 1750 parts. It’s a little more than LEGO’s 1:10 scale models, let’s say that it’s the fault of the mudguards. ^^ I also optimised the inventory: I managed to limit the number of references as much as possible by removing the useless colors and replacing some parts by others when it was possible. All the pictures are available here for the LEGO version and there for the WeBrick version. Fun fact: when I uploaded the pictures on FlickR, I realised that there were 43 images. What a coincidence! Here are the instructions for the LEGO version. If you are interested in building the pink version, reach me on social media (Antonin Laurent on Facebook of anto_lego_creations on Instagram). Please, don't use the forum to speak about the non-LEGO model. Spacial thaks to @Milan and @Jim who authorized me to present the non-LEGO version on the forum.
-
Pathfinder RC SUV [MOC]
Daniel-99 posted a topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Greetings, Eurobricks! I am proud to introduce you my longest and most complicated project! It took me over 2 months to fix all the technical problems revealed in driving tests. Pathfinder is the universal off-roader built for regular outdoor driving. Features: all wheel drive with remote-control 2-speed gearbox Triangulated 4-link live-axle suspension both at the rear and front Brushless motor 1000 kv, 3S Li-Po, GeekServo, RC LEDs Strong transmission: carbon-fiber axes, metal bearing all around, metal U-joints. Realistic 98 mm RC wheels Underbody protection and custom mudguards Every Boy Dream I guess every Lego boy dreams about technic RC car to play with, at least I did. Since 2014 with a release of a legendary set 9398 Rock Crawler, I wanted to build myself a working and "playable" RC Lego off-roader. I was only fourteen at those days, so it took me a while to save money for a 9398 set. The day of joy turned for me to be the first regret in Lego... I was not satisfied with 9398 performance. I spent a lot of time trying to improve the set, but nether succeeded. Every time I felt the lack of power in my car. At the same time the Lego technic community has been growing in numbers, and many RC Lego off-roaders were shown by technic pioneers. I was inspired the most by Sheepo`s Land rover Defender and RM8`s Toyota Hilux. I decided to build Sheepo`s Defender chassis due to the strict limitation of parts available. Well, that car never moved even with wheels attached. Every time i pushed the gas U-joints in the driveshafts got broken. I guess it was caused by some mistakes I made in the chassis. Anyway, the second regret in RC Lego technic caused me to abandon Lego for 3 years. Time passed and Buwizz brick was presented to the community. It provided more power than the PF battery unit. This bring back my hopes of building and RC car with Lego bricks. My first successful project with a BW2 brick was an RC mod of Chevrolet Corvette. Through the couple of years I upgraded my technic parts collection, which allowed me to try bigger and more ambitious projects. With my RC version Jeep Wrangler the dream come true... A true RC off-roader driven by 4x PF L-motors and powered by BW3 unit provided a good speed and torque. Well, if my goals were achieved with jeep Wrangler, than I should stop my story here... The increased power and speed, revealed another problem: the transmission was struggling from plastic dust and hard outdoor conditions... With my next three project I ensured that there is no pure-Lego solution for this problem. Before going further let me explain the goals I wanted to achieve: Performance over details Efficient and durable transmission protected from dust and axle-wearing Max speed over 8 km/h Rigid chassis, capable to survive big bumps Precise handling (caster angle, proportional steering, physical control) Ground clearance over 3.5 studs, off-road geometric passibility 2-speed remote-control gearbox RC setup adapted to Lego and custom parts It was clear to me that plastic Lego parts would not allow to achieve my goals. The key components that required an upgrade were the wheel hubs and the 5x7 frames which hold differentials. Luckily to me I was not the only person on Earth who had this problems. Few AFOLS in Russia developed their custom wheel hubs and 5x7 frames with metal bearings! I ordered them without asking a price! These parts reinforced the weakest components of Lego cars, which allowed me to build several RC projects, such as: Blue Mamba V2, Wilde Beast and Falcon. This project used not only an improved transmission but also a new RC power and control system, which was able to feed PF motors with a constant stream of power. In fact, the system was so powerful, that PF motors started struggling from over-heating. Since I was in a mood of using custom parts, I get myself a Brushless motor setup adapted to Lego. It was designed by another Russian AFOL: a brushless motor A2212 1000-1200 kv placed in a custom Lego-compatible planetary housing. With a new purely RC electronics I started a new phase of advanced Lego technic engineering. Before challenging myself with a big project I decided to test Brushless motor to see its capabilities. I built a Dragonfly buggy V2 with brushless motor and a Unimog trial truck. Both projects proved the power of a Brushless motor. General layout By gaining experience with a Brushless motor in the Unimog project I decided to build a proper off-roader, which I was dreaming off for many years. Since the brushless motor has the dimensions similar to PF XL motor, I decided to use a classical chassis layout with a steering motor attached to the front axle, Brushless motor placed right behind the dashboard and a battery box in the trunk compartment. My Unimog had a similar layout, so I used it as a reference, though some changes were required. The first and most important change I had in mind was the scale. Since I wanted to drive my SUV outdoors, It should be capable to deal with natural terrain, so It should have a decent ground clearance. This can be achieved with bigger wheels and as a result a bigger scale. The choice of wheels As all of you know, the development of a new car starts with a choice of the wheels, which I have a plenty of. You will joke on me, but a plenty does not mean I have the one I need! Let me explain why. Lego has two most common rim diameters: 1.7 and 2.2 inches in diameter. Unimog used 85 mm RC tires placed onto 1.7 inches rims. Such wheels has a great proportions but they was not big enough for my new project. All bigger wheels were based on 1.7 inch rims. As a result they were disproportionally wide. The two sets of 95 mm RC wheels did not fit the future project as well. I surfed trough the net and found a great set of RC wheels, which you can see now on my Pathfinder. It was another win for me! Transmission Since I wanted to use an RC wheels I had to swap the planetary hubs to to the custom hubs with metal bearings. This swap changed the driving characteristics of a car dramatically as well as caused several crucial problems in transmission. Indeed, planetary hubs took a lot of stress from the transmission away, so I had to reinforce the whole transmission in all possible ways. Firstly, I used the reinforced differentials with 12:28 gear reduction. Further I used carbon fiber axles and metal U-joints. Finally, I used custom parts with metal bearings to divide the transmission from the other car components. This prevent any gear skipping and axle melting. Since I wanted to build a fast SUV but not another crawler, I decided to use open differentials both at the front and rear axles. However, I added an auto-lock system to the rear axle at the beginning of the project, which were removed later for practical purposes. Two drive shafts meet together in the middle transfer box. On the upper end transfer box is connected to the motor through the custom planetary gearbox. Gearbox is remotely controlled and has 1:1 and 1:4 ratios. Transfer box had 24:24 gear combination at first, but after driving tests I decided to slower the car down by putting 20:28 gear reduction instead. It turns out that both planetary gears in the motor and in the gear box require lubrications, otherwise the fast spinning satellites get melted. I learned this lesson in a hard way by having two serious breaks during driving tests. I had to order new parts, that costed me both money and time... Front axle The overall geometry of a front axle was taken from Unimog. I kept the upper suspension 6L links, but changed the lower suspension arms to the brick built one. I still do not understand why, but such combination of links provide a great geometry allowing decent flex angles and a slight positive caster angle (then the suspension get loaded by the weight of a car). At the same time the front axle is well protected from side-to-side wobbling. Reinforced lower suspension links provide a great protection for the front driveshaft. In an unfortunate scenario when springs can not absorb all bump energy, lower links prevent the front axle from being pushed backwards, which saves the driveshaft. The wheel hubs were made specifically for live-axle suspension. In combination with inverted 6L suspension arms they allowed me to build a sturdy and compact front axle. Luckily for me, they fit into the rims of my new wheels perfectly: the pivot point of the wheel sits inside the wheel contact patch. Rear axle Unlike the front axle, the final version of the rear axle differs a lot from the one used in the Unimog. Unimog has a 3-link free-swing rear live-axle, which would not fit a faster SUV with the gravity center moved closer to the rear axle. This was easy to fix by attaching springs to the live-axle itself. The real challenge for me caused the geometry of a rear live-axle. Similar to front axle I wanted to use brick built lower suspension links. I made them few studs longer but the 3-link set up did not work at all! Even without the springs rear axle refused to flex normally. I changed the lower links to the 9L Lego links, which gave me a normal flex angles, but this only revealed another problem. I found that with a 3-link setup the driveshaft moves significantly from side to side as well as changes it`s lengh. This might work for crawlers, but it was totally unacceptible for a fast car, so I had to redesign the rear suspension from scrach. In order to keep the driveshaft from unwanted movements, I made it parallel to the lower suspension links. From one side links have a ball joint and from the other just a regular pin connection. Such construction resists the side-to-side wobbling quite nicely, but uses an admissible plastic deformations to flex (since one end of lower links has a pin connection). The single upper arm was changed to a pair of triangulated links. As a result I achieved a decent geometry of the rear axle. Probably one may ask me why I did not use classical solution for the rear axle, given in Toyota Hilux by RM8? Well, because of scale and my main goals of rigidity. That solution worked greatly for 1:14 scale cars built for indoor trial. As long I was building a bigger car which supposed to achieve higher speeds, I had dial with much higher kinetic energy and thus potential load on suspension and transmission. Thus I had to reinforce the suspension as much as possible as well as reduce any unwanted wobbling. The resulting rear live-axle securely hold the drive shaft and does not cause any load on it. Speed VS off-road capabilities After I finished front and rear axles, I had to choose the spring setup. Lego has a very limited springs variation both in length and hardness. The common solution of this problem is to play with the mounting points. One principle I understood very clearly: the closer springs are attached to the wheels, the better responsibility is achieved. Further, the responsibility of suspension fall down significantly if the springs get attached incorrectly, so they bend with the suspension flex. Further I had to decide how soft I want the spring setup to be. The softer it is the better off-road capabilities, but it does negatively affect overall control and stability on high speed. Since the real SUVs are oriented on the speed and control, I decided to do the same choice. My favourite hard 9.5 L springs come very handy for that. Do not get me wrong, with a proper geometry of the suspension, Pathfinder has a great suspension flex (comparing to the real cars), but it clearly can not compare with mad Rock crawlers. To be honest, I would prefer the springs to be a bit softer (0.8 x current hardness) but Lego does not bother about making good suspension kits. Bodywork My favourite real-live off-roaders are Toyota Land Cruiser Prado and Mitsubishi Pajero sport, but I did not build their replicas due to the low skills in modelling. The shapes of the car appeared naturally for me. Firstly I found that 15L wheel arches perfectly fit to 98 mm wheels. The only 15L wheel arches I had came from Lego set 42069 Extreme adventurer. One of my old projects came in my mind shortly. Once I tried to build a Purple Pickup with parts from 42069 set. Well, I was not happy enough with the overlook of Purple Pickup, but I modified the front part of it to use if the next project, namely Wilde Beast. Now I wanted to modify the front part once more to fit my current project. I wanted to build the car in purple colour once again, but Lego does not produce many parts in purple. I found a great 3-d party set containing a plenty of purple! Namely this was a Sembo Technique 701028 set. Summary Before saying my verdict I want to mention the driving tests I made for Pathfinder. All the following tests are presented in the video. Max speed test: max speed is about 10.5 km/h Turning radius test: 0.86 m Stability and handling test: I tried to dive between cones in Zig-Zag trajectory on max possible speed. After 10 minutes training I was able to drive it with average speed over 5 km/h. Low speed suspension test: The car did not performed good here, to pass it a softer springs required. High speed suspension test: Suspension absorb high speed bumps greatly. High stair test: Due to off-road geometric passibility and high torque Pathfinder passed the test even with open differentials. Almighty hill test: I tested the maximal backward roll-over angle, and car was capable to climb into 60 degree hill. You might say that crawlers can do better, but come on guys, this not a crawler, but a short wheel base SUV! Multiple driving tests showed that such placement of a motor protects it from dirt and dust. However I made an underbody protection and custom mudguards to protect the transmission and the cockpit of the car. Now I can give you the conclusion: This project costed me a lot of money and time to finish, but at the end I get myself a robust RC Lego car, which is very fun to drive around. With this project I showed to the community what is not possible to achieve with pure Lego bricks. -

[WIP] Orion - 1:10 racecar
Jerry LEGO Creations posted a topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Hi all, I just stated a new project, and I decided to create a WIP topic for it so I can show my building process on it. It is for now a side project, I started it early since I got stuck a bit on my main project (which can be found here for those interested), so progress probably won't be quick at first. So about the car. It is going to be a 1:10 scale racecar. I'm not aiming for a certain car, I want to design my own. This gives me a lot of freedom in functions and features I want to add. I looked at the Greek mythology to find a name, and settled on Orion. I am going for a different design style than my previous builds. In those builds I used a lot of panels and liftarms to close as many gaps as possible, for this one I want to go for a more 'technic' look. I also have a list of functions/ features I (might) want to add: Definitely want to add these: AWD (3 diffs) Sequential gearbox + engine (a simple 4 speed one to leave room for other functions) Spring-loaded scissor or butterfly doors Advanced suspension set-up & geometry Openable engine bay (probably with a lever in the car) DRS (or a similar system) Rigid monocoque And might add these: Modular bodywork Modular chassis Active aero (e.g. panels which move when steering) If you have other features you'd like me to (try to) add, please let me know. So far I have built the axles. The rear axle is pretty much done, the front axle needs a few refinements, but is mostly finished by now. Rear axle: Orion - Rear axle 1 by Jerry LEGO Creations, on Flickr Functions/ features: Double wishbone Stiff, short travel pushrod suspension with a limiter Heave spring Anti-roll bar Differential Front axle: Orion - Front axle 1 by Jerry LEGO Creations, on Flickr Functions/ features: Double wishbone Stiff suspension (springs are attached with levers) Heave spring Anti-roll bar Differential Positive caster angle Kingpin inclination Ackermann steering geometry At first I also added a negative camber angle, but it was a bit too exaggerated and lead to some problems, so I decided to not add it. This is it for now, hope you like it :D -

Help with Lamborghini Aventador 1:10 MOC [WIP]
damian_kane_iv posted a topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Hello Eurobricks Technic, This is my first forum post and I'm currently attempting a 1:10 supercar technic MOC. Its largely based off of the parts from the 24 Hours Race Car 42039 and the Formula Off-Roader 42037. So far, I've completed the main chassis, drivetrain, and a partial gearbox. I'm opting for a sequential 4-speed since I lack the parts for a more complicated transmission. Pics found here: https://bricksafe.com/pages/damiankaneiv/aventador-wip At the moment I have finished most of the chassis and underside and I am just starting to do bodywork for the car. At the moment I have limited parts due to the rest of my collection being in another state. Features include: 1 All-wheel drive 2 Partial sequential 4-speed Gearbox (inspired by Attika's design; gears are the same but altered housing)... still missing some parts 3 Independent suspension rear and front wheels (largely based off 24 Hour Race Car set) 4 HOG steering (planned) Planned features: 1 Scissor doors 2 Rear aero (deciding whether to invest in designing an active aero mechanism or static wing) I'm drawing a lot of inspiration from Stefan Birkefeld's Aventador design in terms of body work and scale. Let me know what you think and any suggestions or changes I should make. -

[MOC] Volvo F12 Globetrotter log truck 1:10
morson1 posted a topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Hi Lego friends! A short video of my Lego truck, a Volvo F12 Globetrotter log truck. I've been building it over the last couple of years, when money and energy has been present. It's close to 1:10 in scale and weight is 7,1 kilos. It's driven by two buggy motors and the steering is provided by one XL motor. Until the other day it also had a gearbox, but when making the video that gearbox failed utterly so I removed the whole thing and connected the motors straight to the axles for now. There's some more information in the video description if you are interested in the build. It's quite uncertain if I will work more on this truck or not, maybe it will be scrapped, but at least I wanted to share this short video of it here. Hope you enjoy! -

MOC full rc Truck 1:10
schwaiwal posted a topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Mercedes Benz Arocs Crane Truck Full rc MOC with 21motors, 2 sbricks. 100% lego orginal parts -
This is my Volvo fh16 750 rc moc. The main goal was to create a huge 1:10 scale model with less funktions but very strong and fast for this size. the propulsion from lego dirt crusher is fixed long side and the batterybox is in the front
-
wip 4ws supercar chassis pf 1:8th- 1:10th scale
Aventador2004 posted a topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
before i build my battlebot i decided to make a special project, namely: a 4ws supercar with suspension and drive to rear axles the steering works great Now uses gear rack in rear Servo rear geared down 300% Motors have a 3:1 gear ratio New version updated full gallery at http://bricksafe.com/pages/aventador2014/4ws# hope this will be usefull for all Aventador -

Scania Logging Truck 1:10
Porsche96 posted a topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Welcome everybody :) My name is Michał, I come from Poland and I’m 18. It's my first MOC showed here. Scania Logging Truck This truck is made in scale 1:10. The total size is: 113 studs of length, 29 of width and 37 of height (90/23/30 cm). It weighs 6,3 kg, has 10 motors and a lot of parts. Specifications: 1:10 scale lenght 113s / width 29s / height 37s Weight: 6,3kg 10 motors 4x6 drive Front independent suspension Rear floating suspension History From some time I've been planning to build something huge, when I had started building I didn't really know what I want to build. I chose Scania used to transporting wood. I built it from November to March. There was a 2-speed gearbox, but then there wasn’t enough space for crane and turntable. Suspension Front suspension is independent. For depreciation there are used 2 springs form the 9,5L absorber (from Unimog) and 2 springs from the yellow 6,5L absorber per each wheel. Rear suspension is floating, based on the elements of Unimog. For deprecation there are used 2 springs from the yellow 6,5L absorber per each axle. Driving To drive I used two XL motors with reduction 7:1.They are connected electrically and mechanically. Steering To steer I used one M motor with reduction 5:1. The drive is passed to 1x4 gear rack. Pneumatic The compressor is driven by M motor with the ratio 1:1. The servo motor conrols the valve and with M motor is connected electrically, so when the compressor is working the valve opens or closes. The Crane Rotation The rotation is based on the turntable, which is driven by M motor with ratio 168:1. The crane rotates only 180°, because of the pneumatic lines brought to the gripper. First section It is connected directly with the turntable. There are 2 linear actuators, driven by XL motor with reduction 3,5:1, responsible for lifting the second section. Second section It is connected to the first section. There is 1 linear actuators, driven by M motor with ratio 4,6:1. It is used to lift the third section. Inside there is a M motor responsible for rotating the gripper. Third section and the gripper To the third section there is connected the gripper, which is closed and opened by 1 large pneumatic cylinder. The rotation is driven by M motor with reduction 58:1. Outriggers Outriggers are built from mini LAs and driven by M motor. Others functions: Openable doors and cabine Headlights LED Working V8 dummy Some photos GALLERY