Search the Community
Showing results for tags 'servo'.
-
 This topic is for pneumatic tips and tricks, how to use pneumatics and mocs including pneumatics or just general things about pneumatics. Ps mods if you feel this topic is not required feel free to remove. I just made this seeing there was no general discussion on pneumatics.
This topic is for pneumatic tips and tricks, how to use pneumatics and mocs including pneumatics or just general things about pneumatics. Ps mods if you feel this topic is not required feel free to remove. I just made this seeing there was no general discussion on pneumatics. -
 Hi All, title is already self explanatory. I know that it is possible to connect powered up motors to a buwizz using dedicated adapters. What about controlling a powered up servo with buwizz? Is that possible? I did I quick search but did not find anything so specific. Thanks.
Hi All, title is already self explanatory. I know that it is possible to connect powered up motors to a buwizz using dedicated adapters. What about controlling a powered up servo with buwizz? Is that possible? I did I quick search but did not find anything so specific. Thanks. -
 In an attempt to create an RC LEGO motorbike, I had to figure out a steering method. Moving a weight from left to right was (successfully) done before, but I couldn't find LEGO bikes with counter-steering. Inspired by the videos of many real RC bike lovers, I came up with this LEGO-ish implementation. It's not for LEGO purists, it contains modified parts. But it demonstrates pretty nice how counter-steering works and how it can be implemented on a LEGO bike (using a servo). I therefore thought it might be of interest to some of you. If modifying LEGO parts makes you sick, please skip this video. If you enjoy creating new parts (out of other LEGO parts), great! Let me hear your thoughts. On this matter, I personally start to enjoy the use of custom springs more and more (will do a separate video on this subject) and ... I'd love to make a case for an axle with one ball socket. Together with a (custom) spring, can be used in almost any vehicle for suspension or anything else. Have a look at the video and you'll see what I mean. Was an essential element to create this steering. Enjoy watching, looking forward to hear your comments. https://youtu.be/AZQkJCd0VKg
In an attempt to create an RC LEGO motorbike, I had to figure out a steering method. Moving a weight from left to right was (successfully) done before, but I couldn't find LEGO bikes with counter-steering. Inspired by the videos of many real RC bike lovers, I came up with this LEGO-ish implementation. It's not for LEGO purists, it contains modified parts. But it demonstrates pretty nice how counter-steering works and how it can be implemented on a LEGO bike (using a servo). I therefore thought it might be of interest to some of you. If modifying LEGO parts makes you sick, please skip this video. If you enjoy creating new parts (out of other LEGO parts), great! Let me hear your thoughts. On this matter, I personally start to enjoy the use of custom springs more and more (will do a separate video on this subject) and ... I'd love to make a case for an axle with one ball socket. Together with a (custom) spring, can be used in almost any vehicle for suspension or anything else. Have a look at the video and you'll see what I mean. Was an essential element to create this steering. Enjoy watching, looking forward to hear your comments. https://youtu.be/AZQkJCd0VKg -
Hey all, this is my first post! I built this car roughly in an hour. It is based off of the Baja Buggies that are pretty awesome, and inspired a bit by the Class 1 Unlimited Buggy by Agrof. This car is powered by a Buggy Motor to a differential, and steered by a Servo. I think I will try to add Long Travel suspension to it, but for now it has no suspension. Let me know what you think- I would love advice! :) (Edit) Here's the Underside of the Car
-
A compact sequential heavy-duty 4 speed remote controlled AWD gearbox Each gear of this remote controlled gearbox approximately doubles the speed of the previous. The output shaft contains an integrated lockable differential for AWD. See the video for a WORKING DEMO | FREE INSTRUCTIONS below. GEAR RATIOS 1st 6:1 2nd 3.3:1 3rd 1.8:1 4th 1:1 FEATURES compact remote controllable sequential gearbox 4 transmission speeds evenly distributed gear ratios differential output (AWD) differential lock single rotary catch many mounting points no half studs INSTRUCTIONS [PDF] https://bricksafe.com/files/hdegroot/remote-controlled-4-speed-awd-gearbox---with-perfect-gear-ratios/remote-controlled-4speed-awd-gearbox-with-differential-lock.pdf [3D MODEL] https://bricksafe.com/files/hdegroot/remote-controlled-4-speed-awd-gearbox---with-perfect-gear-ratios/remote-controlled-4speed-awd-gearbox-with-differential-lock.io REBRICKABLE: https://rebrickable.com/mocs/MOC-83457/hdegroot/remote-controlled-4-speed-awd-gearbox-with-perfect-gear-ratios BRICKLINK: https://www.bricklink.com/v3/studio/design.page?idModel=244834
-
One of my NXT servos is exhibiting some odd behavior. I had to replace a servo for a different reason and this might be the replacement, but I'm not entirely sure as I didn't mark it as such. In any case, I'm curious if anyone else has seen this and knows the cause. With two servos that act as expected, I can place a single Move block in the program and use any of the duration settings and both servos will run and stop when programmed or run continuously if "Unlimited" is selected. However, when one servo is replaced with the misbehaving one, regardless of the duration setting, the latter servo will run continuously and the good servo will twitch as if it's about to run, but stops immediately. I have to end the program to get the "bad" servo to stop. If I place the Move block inside a Loop set to "Forever," the above behavior will be identical except for one scenario. If I set the Move block duration to "Unlimited," both servos will run and can be controlled by the Loop's "Control" setting, i.e. they will either run continuously or run and stop as set by the loop control setting. Simply using individual "Motor" blocks to control the servos does not solve the problem. There are good and bad programming scenarios with those as well with regard to the bad servo. The best guess I can come up with is that the bad servo is either not sending or not receiving a feedback signal, maybe both. I did wonder, though, if these servos have any firmware in them that might behave differently depending on when they were made. This isn't a fatal flaw as I can use the servo, but I am curious what might be going on. Thanks, Paul
-
 Please kindly watch this video: https://youtu.be/yVvvIO7Jk0Y
Please kindly watch this video: https://youtu.be/yVvvIO7Jk0Y -
Dear folks, Don't know if this forum is in need of 'yet another AWD front steering', but decided to post it anyway since it may have some interesting features to share: - Compact 5 stud high modular design - Strong, double suspension per arm - Embedded cross block, to prevent bending axles - Adjustable steering arms to enable toe-in and toe-out (and as a side effect, prevents damage when crashing) - Ready for (2.4 GHz RC) servo steering ;) I needed a flat front module to fit my chassis, but didn't want to use the 'old' 3 stud high Wheel Hub (50301). It simply has too much friction in the turns and breaks too easily. Furthermore I wanted to use the universal joint (61903) in stead of the cardan cup (92906). Since I'm putting significant torque on these joints, and it turns out the universal joint is much stronger. However, this does requires the wheel arms to pivot 1 stud wider than using the standard config. Using the 5 stud high 11949 front wheel bearing and bound to a maximum height, I needed a way to fit suspension within this height. Very happy with the result. Anyway, have a look if you're interested. Happy to hear if anything can be improved. https://www.flickr.com/photos/153697698@N03/sets/72157695812709340
-
Camellia Café presents a special designed SERVO JEEP model being controlled by Camellia Café Servo motor controller with ARM technology. ' This JEEP is a Full time or Part time four wheel drive car with shrink function and Servo running model. Front wheels and rear wheels are driven by two individual LEGO motors. When both motors are active, it is a full time four wheel drive car. When either is active, it is a part time four wheel drive car. The speed can be adjusted in a large range and with good accuracy via our motor controller. With an addition motor, the car body is able to shrink for easy parking, and extend to get spacious inner space. When using a mobile phone and Camellia JEEP APP, your children could control SERVO JEEP remotely. No matter turning, running back or running uphill, SERVO JEEP is mobile and powerful. In the SERVO mode, SERVO JEEP can run in a precise distance at a preset value. This plays a key role in autopilot and auto parking. The steering motor can be controlled with 5 degrees at minimum. Front differential and rear differential are used. Front wheels driven motor and rear wheels driven motor. Front wheels use double wishbone suspension. Steering system With an addition motor, the car body is able to shrink for easy parking, and extend to get spacious inner space. 40th LEGO Technic nameplate. Without car cover cloth. The car body cover. Open the front cover to see the front engine. Front engine - 6 cylinders V type. Rear engine - 2 cylinders V type. Rear of JEEP. Car lights: Daytime running light, Foglight, High beam and Red lights for break. Please enjoy Camellia Café servo motor controller and drive SERVO JEEP model. And make you own car at home. http://www.camellia.xin/models/servojeep.html
-
Strandbeest is designed by Theodorus Gerardus Jozef who is a great Dutch artist. Today I make my droid with Strandbeest's legs. Each leg in this contraption has 11 movable rods and 2 fixed rods which form 8 joints. Camellia Servo Strandbeest droid model is controlled by CAPPUCCINO controller with ARM technology. Each body part of this droid has an individual LEGO motor to drive its moving speed, distance, time and direction. As 8 LEGO motors are used, droid's head, body, left leg, right leg, left arm, right arm, left hand and right hand are able to be controlled cooperatively! Left and right by two motors, each has 2 front and 2 rear legs. Upper body Left arm Right arm Left hand Right hand Head and eyes, One eye is a camera to record its view. Waist Back 40th LEGO Technic nameplate 1977-2007 Just make you own droid at home. Welcome to Camellia Café
-
 Hey guys! It's been a little while since the last build, but I've got a new model. This time it's a class 1 offroad racing buggy like the one in the DIRT2 video game. It has servo steering and two RC motors powering it. Suspension on the front is double wishbone, and rear is trailing arm. My main goal was to make it fast, sturdy, and look good, and I feel like I got a pretty good balance. The only drawbacks are that the steering isn't very precise, and the IR receivers don't get as much reception as I would like outside in the sun. Still, it was a lot of fun to film, hope you guys like the video. Enjoy!
Hey guys! It's been a little while since the last build, but I've got a new model. This time it's a class 1 offroad racing buggy like the one in the DIRT2 video game. It has servo steering and two RC motors powering it. Suspension on the front is double wishbone, and rear is trailing arm. My main goal was to make it fast, sturdy, and look good, and I feel like I got a pretty good balance. The only drawbacks are that the steering isn't very precise, and the IR receivers don't get as much reception as I would like outside in the sun. Still, it was a lot of fun to film, hope you guys like the video. Enjoy! -
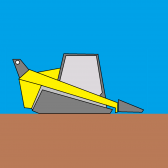
 Hi guys, can I damage PF Servo motor if I will force to turn it only 45° as you can see it on image bellow? Green axle will be connected to servo that will be fixed to red part:
Hi guys, can I damage PF Servo motor if I will force to turn it only 45° as you can see it on image bellow? Green axle will be connected to servo that will be fixed to red part: -
 are you waiting for a new servo? are you tired of spending 25-30 dollars on a servo? problem solved. with a few common parts and a rubber band save yourself the extra money and get a m motor and these parts. note: i was inspired by @LXF's servo attachment. full instructions here. enjoy the servo!!!!!
are you waiting for a new servo? are you tired of spending 25-30 dollars on a servo? problem solved. with a few common parts and a rubber band save yourself the extra money and get a m motor and these parts. note: i was inspired by @LXF's servo attachment. full instructions here. enjoy the servo!!!!! -
 Hello everyone, This is my new MOC, it is my third creation using non-Lego parts. Without the body was the fastest out of the three going over 20mph-32kph but with the body it only went 17.4mph-27.9kph which was included in the video. This project was started when I bought the 8880 style hubs from Efferman on shapeways and evolved to also use the non-Lego electronics. I also used the high torque differential, 550 motor mount, and the CV joints for the 8880 type joints, designed by Efferman. This was also my first creation to use my custom designed part, the 5x7 frame for bearings IMG_1130 by JJ2Sam, on Flickr I went with a lime and black color scheme on this one to give it a pop of color compared to my other, more bland creations that are white and black. IMG_1131 by JJ2Sam, on Flickr I worked a lot on the front to make it look menacing like most real supercars often do. IMG_1132 by JJ2Sam, on Flickr With the custom hubs I was able to make the gaps around the wheel very small but still have it where it does not bind. IMG_1134 by JJ2Sam, on Flickr I covered up the bottom to stop dirt and other debris from getting inside the gears and motor that would cause the parts to wear faster and also shorten the life of the motor. IMG_1150 by JJ2Sam, on Flickr Here is a picture with the tape and body removed. I mounted the motor and other electronics as low as possible to keep the SOG low for better handling. The gearing is 9:1, there is a 12T gear mounted to the motor and a 36T going into my 5x7 frame with bearings, along with lithium grease, that made the drive chain have almost no friction. With such low friction the motor almost never got hot and no drive parts were damaged even after me driving it on a bumpy road and some crashes. IMG_1149 by JJ2Sam, on Flickr The hubs seem to have blended into the background in this picture but here you can see the rear assembly, I made this creation modular where if you remove the two black beams connected to the two dogbone pieces on each side the entire rear axle could be taken for maintenance like regreasng if any was needed. IMG_1148 by JJ2Sam, on Flickr IMG_1146 by JJ2Sam, on Flickr The front axle was nothing special, just two wishbones with different lengths and so on.... The performance was good but it did tend to pull left or right dew to the slack in Lego parts, but there is nothing you can do about that... Finally the video
Hello everyone, This is my new MOC, it is my third creation using non-Lego parts. Without the body was the fastest out of the three going over 20mph-32kph but with the body it only went 17.4mph-27.9kph which was included in the video. This project was started when I bought the 8880 style hubs from Efferman on shapeways and evolved to also use the non-Lego electronics. I also used the high torque differential, 550 motor mount, and the CV joints for the 8880 type joints, designed by Efferman. This was also my first creation to use my custom designed part, the 5x7 frame for bearings IMG_1130 by JJ2Sam, on Flickr I went with a lime and black color scheme on this one to give it a pop of color compared to my other, more bland creations that are white and black. IMG_1131 by JJ2Sam, on Flickr I worked a lot on the front to make it look menacing like most real supercars often do. IMG_1132 by JJ2Sam, on Flickr With the custom hubs I was able to make the gaps around the wheel very small but still have it where it does not bind. IMG_1134 by JJ2Sam, on Flickr I covered up the bottom to stop dirt and other debris from getting inside the gears and motor that would cause the parts to wear faster and also shorten the life of the motor. IMG_1150 by JJ2Sam, on Flickr Here is a picture with the tape and body removed. I mounted the motor and other electronics as low as possible to keep the SOG low for better handling. The gearing is 9:1, there is a 12T gear mounted to the motor and a 36T going into my 5x7 frame with bearings, along with lithium grease, that made the drive chain have almost no friction. With such low friction the motor almost never got hot and no drive parts were damaged even after me driving it on a bumpy road and some crashes. IMG_1149 by JJ2Sam, on Flickr The hubs seem to have blended into the background in this picture but here you can see the rear assembly, I made this creation modular where if you remove the two black beams connected to the two dogbone pieces on each side the entire rear axle could be taken for maintenance like regreasng if any was needed. IMG_1148 by JJ2Sam, on Flickr IMG_1146 by JJ2Sam, on Flickr The front axle was nothing special, just two wishbones with different lengths and so on.... The performance was good but it did tend to pull left or right dew to the slack in Lego parts, but there is nothing you can do about that... Finally the video -

[MOC] Unimog U90
Thirdwigg posted a topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Another completed MOC hailing from Thirdwiggville. Based on the old and ugly (can I say that?) U90, which sees little love in these parts. Much more at thirdwigg.com. Features: 4x4 PF XL drive PF Servo steering Portal Axles Live axle suspension Removable Bed and Cab Three way tipper bed Fischertechnic tires Full Flickr gallery here. Enjoy. -
 I haven't posted any of my own content recently due to lack of time and ideas, but about a month ago my last attempt at a high speed vehicle was sitting on my desk, partially disassembled, when I got a spark in my mind and I knew exactly what to do. Previously I made multiple failed attempts at making a complex independent suspension work, but I couldn't get a practical result without modifying parts, which I wanted to avoid. So this time around I went for a solid axle with 4 link suspension. I spent a long time building and rebuilding the car until I got a balance of power, weight, and strength that I was happy with. Apart from a couple pieces I forgot to add here and there, this is the final build: I could have gone for lower weight, but the reinforcements were necessary to bring the chassis flex to a minimum, letting the suspension do its job. The car barely bottoms out under full compression, but I doubt this will happen out on the road. The higher clearance and lack of u-joints should reduce the risk of damaging parts. The rear wheels are driven by two buggy motors each, acting as an electronic differential. Since the motors are DC motors, this system will never be perfect, but it's as good as it gets. The only modified lego pieces on this build are the pneumatic cylinders (now act as dampened shocks) and the wheelhubs (made by nicjasno at LPEpower ) The front suspension is independent multilink, my own blend of various ideas I got from nicjasno's Standard servo steering. I lubricated the large ball joints on the upper 'wishbones' to reduce friction. Nice and smooth underside, which also adds to the structural rigidity (note the numerous pins) Another look at the multilink setup in action I've already tested this model on the road, and it performs very well, but I won't be making a video until I receive an order of 4 brand new custom wheel hubs, as the current set have experienced some serious wear and tear over the past year thanks to my punishing tests If you are new or aren't familiar with my previous projects, this chassis is powered by a near 12 volt battery and a 3rd party RC system that I made work with Lego motors. Multiple people have asked why I don't build bodywork for any of these large scale vehicles, and to be honest, I really enjoy building the chassis, while bodywork is...meh. I could get better with practice, but I simply don't want to spend time perfecting a body, and the extra weight would reduce the play factor, unless I become a wizard with flex axles . I think this model is the ultimate balance of speed, moderate realism, and weight, (within my building style) so I don't see myself making anything new soon with my other hobbies and work taking up most of my time. Special thanks to nicjasno for the tips on the front suspension, and for making the LPEpower parts/show. Feel free to leave any comments/criticisms/ideas for a new project. Enjoy!
I haven't posted any of my own content recently due to lack of time and ideas, but about a month ago my last attempt at a high speed vehicle was sitting on my desk, partially disassembled, when I got a spark in my mind and I knew exactly what to do. Previously I made multiple failed attempts at making a complex independent suspension work, but I couldn't get a practical result without modifying parts, which I wanted to avoid. So this time around I went for a solid axle with 4 link suspension. I spent a long time building and rebuilding the car until I got a balance of power, weight, and strength that I was happy with. Apart from a couple pieces I forgot to add here and there, this is the final build: I could have gone for lower weight, but the reinforcements were necessary to bring the chassis flex to a minimum, letting the suspension do its job. The car barely bottoms out under full compression, but I doubt this will happen out on the road. The higher clearance and lack of u-joints should reduce the risk of damaging parts. The rear wheels are driven by two buggy motors each, acting as an electronic differential. Since the motors are DC motors, this system will never be perfect, but it's as good as it gets. The only modified lego pieces on this build are the pneumatic cylinders (now act as dampened shocks) and the wheelhubs (made by nicjasno at LPEpower ) The front suspension is independent multilink, my own blend of various ideas I got from nicjasno's Standard servo steering. I lubricated the large ball joints on the upper 'wishbones' to reduce friction. Nice and smooth underside, which also adds to the structural rigidity (note the numerous pins) Another look at the multilink setup in action I've already tested this model on the road, and it performs very well, but I won't be making a video until I receive an order of 4 brand new custom wheel hubs, as the current set have experienced some serious wear and tear over the past year thanks to my punishing tests If you are new or aren't familiar with my previous projects, this chassis is powered by a near 12 volt battery and a 3rd party RC system that I made work with Lego motors. Multiple people have asked why I don't build bodywork for any of these large scale vehicles, and to be honest, I really enjoy building the chassis, while bodywork is...meh. I could get better with practice, but I simply don't want to spend time perfecting a body, and the extra weight would reduce the play factor, unless I become a wizard with flex axles . I think this model is the ultimate balance of speed, moderate realism, and weight, (within my building style) so I don't see myself making anything new soon with my other hobbies and work taking up most of my time. Special thanks to nicjasno for the tips on the front suspension, and for making the LPEpower parts/show. Feel free to leave any comments/criticisms/ideas for a new project. Enjoy! -
 In the last couple of months I have, amongst other projects, been working on the rerelease of Truck T12. Because the detachable gooseneck lowboy "Trailer Tr4 MkII" can be combined with my previously released trucks and with Technic set 8258 it is why I released it first. Instructions for this lowboy have been asked so many times that I thought it would make sense to start with it. Normally I start with a truck followed by a trailer to join it. Model "Truck T12 MkII" and is build after the Mack Granite with LEGO® in scale 1:17,5 and motorized using LEGO® Power Functions. It is a model of a Mack Granite 6x4 day cab truck. Both the looks and specifications are adjusted to match lowboy ”Trailer Tr4 MkII” and the optional jeep and booster ”Trailer Tr4 MkII Add1”. This rather heavy lowboy trailer combination, which might include a load, requires some extra power.Even though this truck is designed to go with ”Trailer Tr4 MkII” plus ”Trailer Tr4 MkII Add1” lowboy combination in the first place, it doesn’t necessarily mean it can't be used with other available trailers as well. If you prefer to give it a flat bed or log trailer, you are free to do so! If a different trailer is used it might be useful to give this truck's drivetrain a various gear setup. For this a separate PDF file is available that tells you what gear reductions to use with which trailer. It also shows you how to do so. Evidently the torque will be reduced, but with lighter weight trailers that is no problem at all. This Mack Granite model is powered by a Mack MP8 engine which is visible with the hood opened. This power source is an inline 6 cylinder engine with a displacement of 13.0 L. The horsepower range is from 425 up to 505 HP and this engine has a torque range from 1570 to 1760. You could build it yourself, building instructions and inventory/parts list are available. You will be very excited from the moment you start the build of "Truck T12 MkII" till you finish it with about 360 different parts totaling 1900 pieces.
In the last couple of months I have, amongst other projects, been working on the rerelease of Truck T12. Because the detachable gooseneck lowboy "Trailer Tr4 MkII" can be combined with my previously released trucks and with Technic set 8258 it is why I released it first. Instructions for this lowboy have been asked so many times that I thought it would make sense to start with it. Normally I start with a truck followed by a trailer to join it. Model "Truck T12 MkII" and is build after the Mack Granite with LEGO® in scale 1:17,5 and motorized using LEGO® Power Functions. It is a model of a Mack Granite 6x4 day cab truck. Both the looks and specifications are adjusted to match lowboy ”Trailer Tr4 MkII” and the optional jeep and booster ”Trailer Tr4 MkII Add1”. This rather heavy lowboy trailer combination, which might include a load, requires some extra power.Even though this truck is designed to go with ”Trailer Tr4 MkII” plus ”Trailer Tr4 MkII Add1” lowboy combination in the first place, it doesn’t necessarily mean it can't be used with other available trailers as well. If you prefer to give it a flat bed or log trailer, you are free to do so! If a different trailer is used it might be useful to give this truck's drivetrain a various gear setup. For this a separate PDF file is available that tells you what gear reductions to use with which trailer. It also shows you how to do so. Evidently the torque will be reduced, but with lighter weight trailers that is no problem at all. This Mack Granite model is powered by a Mack MP8 engine which is visible with the hood opened. This power source is an inline 6 cylinder engine with a displacement of 13.0 L. The horsepower range is from 425 up to 505 HP and this engine has a torque range from 1570 to 1760. You could build it yourself, building instructions and inventory/parts list are available. You will be very excited from the moment you start the build of "Truck T12 MkII" till you finish it with about 360 different parts totaling 1900 pieces. -
How to Motorize the Mars Rover I am looking for some suggestions. My daughter is building the Mars Rover set (go here for the details: http://www.eurobricks.com/forum/index.php?showtopic=98222) for a presentation at school and I told her I would help make it operate by remote control with one of the power function kits. Problem is that it is a lot more complex than I thought. (I have no experience at the expert level building. (No building the rover is not part of the project, she is doing it as an additional part of her presentation on Rovers). I think I can maybe get it moving with a remote, receiver and simple motor attached to one wheel, but I do not have any idea how to do the steering and don’t know how to move any of the other functions (camera, antenna, robotic arm). see So, to steer, I use a servo? How do I operate the other things, more servos? And to move things slowly, do I need complex gearing? (I was looking at the SBrick which might work. I saw a few designed steering racks and chassis on Ebay, some simple, some pretty complex. Would I be better off buying another set that has a chassis and steering and drive designed to work with motors and then build it and adapt the Rover to it? Any suggestions to help me figure out what I need to do and what to buy to easily make this work would be much appreciated. Thanks!
-
Hi guys, just finished my latest build after almost year long break from lego. It,s 8x4x4 truck inspired by Mercedes Actros. I know, another truck... But I ordered thouse weels and they seems to be great for trucks in medium scale. Features: 4x2 Drive by L motor 4x2 Steering by servo motor with different angle (great turning radius) Manual 2 speed gearbox Openable doors Liftable cabin I would like to build more trucks in this scale! Any suggestions, what to build? I was thiking cherry picker or dumper for start? I will propably also create LDD model if anyone interested? PS: Sorry for photo quality...
-
 I have long awaited the moment that two race buggy motors would be in my reach, as they are quite expensive now... and I also bought the Lego Technic lipo battery two years ago. The perfect recipe for a small lightweight racer! Read the rest of the story at: http://www.moc-pages.../moc.php/424516. For now, there's just these two pictures and two videos. To post the photos on Eurobricks, I had to serieusly resize them. If you want to see the better quality images, just click this link: http://www.brickshel...ry.cgi?f=561899. All photos can also be found on the MocPage link, and can also be hosted from MocPages. This is because brickshelf has sometimes a rather long posting time. Please do not use THESE EXACT photos on another website, they are really at 10% of their real quality because Eurobricks requests it. The brickshelf photos are really better!
I have long awaited the moment that two race buggy motors would be in my reach, as they are quite expensive now... and I also bought the Lego Technic lipo battery two years ago. The perfect recipe for a small lightweight racer! Read the rest of the story at: http://www.moc-pages.../moc.php/424516. For now, there's just these two pictures and two videos. To post the photos on Eurobricks, I had to serieusly resize them. If you want to see the better quality images, just click this link: http://www.brickshel...ry.cgi?f=561899. All photos can also be found on the MocPage link, and can also be hosted from MocPages. This is because brickshelf has sometimes a rather long posting time. Please do not use THESE EXACT photos on another website, they are really at 10% of their real quality because Eurobricks requests it. The brickshelf photos are really better! -
I believe I have a faulty Power Functions Servo Motor. Sometimes it just doesn't work, regerdless which batterybox or IR receiver I connect it to. When I wiggle the cable a little, especially near the connection to the motor, it starts to work again. I think there's a bad connection between the cable and the motor or (invisible) damage inside the cable. What should I do? Do I have a guarantee? I have hardly ever used the motor. Should I contact Lego by letter/email/phonecall? Or should I go back to the store? I don't have the receipt of my 9398 anymore. Thanks for any suggestions.
-
 THIS TOPIC got me an idea to make a mechanical servo motor using normal power functions. Because BS is down a video will have to do for now:
THIS TOPIC got me an idea to make a mechanical servo motor using normal power functions. Because BS is down a video will have to do for now: -
 I am thinking of implementing a ratchet action with a servo motor, implemented with a 24T clutch and a catchment mechanism. Activating the servo at full power should give me 90 degrees of rotation on the 24T gear, 'clicking' through the catchment, and rotation on any meshed gears. If the catchment holds, then when the servo returns to its start position, the clutch should slip and not turn back when its axle turns, and any gears turned by the clutch gear should retain their new position and not return back? I think this would be a good way to transfer rotation to linear step motion, which I will need for a MOC I am thinking of. thanks for comments
I am thinking of implementing a ratchet action with a servo motor, implemented with a 24T clutch and a catchment mechanism. Activating the servo at full power should give me 90 degrees of rotation on the 24T gear, 'clicking' through the catchment, and rotation on any meshed gears. If the catchment holds, then when the servo returns to its start position, the clutch should slip and not turn back when its axle turns, and any gears turned by the clutch gear should retain their new position and not return back? I think this would be a good way to transfer rotation to linear step motion, which I will need for a MOC I am thinking of. thanks for comments -
Custom RC System
z3_2drive posted a topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
First here are the links to all the parts in the system excluding battery and project box: *Motor controller: http://www.pololu.com/product/777 Receiver/Transmitter: http://www.rcplanet...._p/futk3100.htm *The motor controller I linked is the heavy-duty model that I used in my models, but there is a smaller, less powerful and cheaper version too* Ah I guess I'll link it too... Motor Controller(smaller option): http://www.pololu.com/product/767 Now, Here is the fully explained system: First: the jumble of lego wires on the left are the four wires that connect to the RC Buggy motors. the lego wire coming from the left is an extension to the servo. the red/white wires connect the controller and receiver the black and red wires connect to the port on the right, which you then plug a battery into. Second: the four lego motor wires are put together into one pair, which connects to the first two ports of the controller- Third:The red/black wires, which supply the power from the battery, connect into the 3rd and 4th port. *(There are six ports in total, where you see the screw-heads)* Fourth: Here is the tricky part The servo wire is made up of four small wires. Two of these supply power, and two control the movements of the servo. The two that supply the power are connected to port 3 and 4, with the battery wires. The two that control movement are connected to port 5 and 6, all by themselves. ^^^ so the way it is seen here is: SERVOCONTROL1--SERVOCONTROL2--SERVO/BATTERYPOWER1--SERVO/BATTERYPOWER2--MOTORCONTROL1--MOTORCONTROL2 Ok, so port 1/2 control buggy motors, port 3/4 give power to the system, port 5/6 control servo Here it shows how 1/2 and 5/6 correspond to two channels on the receiver: The red/white wires connect to channel 1 & 2 on the receiver: And finally here it is all together again: Sorry for the baby steps but I wanted to be clear. To know which wires from the servo control and give power, simply test with a multimeter and have this at your disposal: -
Ok, after figuring out some video problems I am going to post about my final satisfaction out of my Four chassis builds. While V4 may be slower (slower output), It is extremely robust, simple and has the best handling out of the Four . It is powered by four Buggy motors and steering uses the servo motor. Electronics-wise it uses the same hobby-grade motor controller, receiver and transmitter that I have mentioned before and my custom battery. These are the only non lego parts Performance is great, and a couple days ago during some play I managed to barrel-roll it, only knocking the project box containing the electronics a bit loose For now I only have the video to show, but I will upload pictures soon