
Zerobricks
-
Posts
8,023 -
Joined
-
Last visited
Content Type
Profiles
Forums
Gallery
Everything posted by Zerobricks
-
 Here you go, but remember I'm using LDD with new parts added: https://bricksafe.com/files/Zblj/light-4x4/Light 4x4 With diffs.lxf
Here you go, but remember I'm using LDD with new parts added: https://bricksafe.com/files/Zblj/light-4x4/Light 4x4 With diffs.lxf -
Great response, @gyenesvi The new CV joints though very strong do show wear and tear, but that happens even in the original 42099. Same thing with planetary hubs, they get loose over time and generate a lot of white dust on the brim of the hub connection. Regarding gearing, slow output of the BuWizz/RC motors seems the most optimal with the planetary hubs indeed and if you need more torque, a normal or Ferrari's differential can help along. My previous models used the original and brick-built portal hubs. Planetary hubs do have a few weaknesses compared to the planetary hubs in my opinion though: Larger pivot point which requires a stronger steering mechanism Lower gearing ratio (maximum of 3:1 is possible) means that the usual cardan joint is prone to breaking apart - this could be remedied using the new CV joints The gears are exposed and prone to catching dirt, reducing performance And lastly the last axle - the one driving the gears does tends to bend out of shape, especially with heavier models since it has to carry the final generated torque of the whole drivetrain Another problem with portal hubs is that due to their lower gearing they require stronger differentials/perpendicular drives. This is why the geraboxes in those models tend to gear down in lower gears instead of fearing up. But gearing down can and does cause the gears to skip - in my case the Tiger 6x6 can skip the 8 tooth gears on the differential casing acting as a low gear when all wheels are blocked. When gearing up in the Widlcat 6x6, there are no such issues. And of course the planetary hubs have their own weaknesses: Lower ground celarance compared to planetary hubs Higher initial friction Harder to integrate into the model No user-replacable components - once it's worn out there's notinh to replace, you can only buy a new one Lastly, regarding controllability, you are totally right, no amount of power does any good if you can't control it. And yes I wasn't pushing the Wildcat 6x6 to it's full capability, since I was trying to get through all the obstacles for extra points and I also didn't wanna risk any power cut-outs.
-
One more idea. You can use a double perendicular connector wedged inside the 6L suspension arm. This way you can use a 3L pin to hold everything together.
-
I could, though I think an upgraded version with 4 motors might have less performance issues and longer play time.
-
Exactly! And going into that direction you end up with the Wildcat 6x6 with 210g/motor. So as suggested there surely is a middle ground where you have sufficient Power To Weight ratio while also not going over let's say 1500 grams.
-
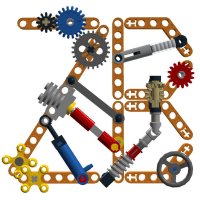
I had many people ask me in the Wildcat 6x6 topic and it's video if I really need 12 motors, couldn't I get simillar performance with a lighter model? So in order to test and showcase my reasoning I built this very simple 4x4, it uses only 555 parts and is powered by "only" 2 motors: Originally the driveline and gear ratio was as following: Motor's fast outputs to the 2 speed gearbox - 12 tooth bevel gears - via cardan joints to the planetary hubs But than I soon noticed the model lacked sufficient torque, especially in high gear, so I changed the driveline to the following: Motor's fast outputs to the 2 speed gearbox - 20:28 normal differential - via small CV joints to the planetary hubs This driveline ended up having a very simillar gear ratio as the Wildcat 6x6, I think it's some 3% faster, which is negliable IMO. One thing that I did have to do is lubricate the main drive axle, as it was prone to melting in high gear: Because this light 4x4 has open differentials, the front suspension was designed in such a way that it imitatates a pendular front axle by having shock absorbers on a pivot. This allows the front axle to basically act like a pendular axle, easily adjusting to the terrain amd keeping the weight even on both left and right side. So...What about the results? Well, the outdoor test showed that the model performs good in low gear, it has plenty of torque to climb and works really smooth and efficient. But where it lacked was in high gear. While it did reach 15 km/h as the Wildcat 6x6, the acceleration itself was much lower and both motors were drawing a lot of current. Any prologned steering in high gear at full power caused the motors to overheat and cut out, no powersliding on gravel like the Wildcat 6x6. Also when driving on the pump track, it was able to go over big hills in high gear, but it was lacking the speed to actually get significant air, again unlike the Wildcat 6x6. So... Why does it seem more motors and a heavier model is preferable? The answer comes to one factor - Power To Weight ratio: Wildcat 6x6 uses 12 drive motors and weighs around 2,5 kg - this means each motor has to move around 208 grams of weight This light 4x4 offroader uses 2 drive motors weighs around 0,8 kg - in this case each motor has to deal with 400 grams of weight, almost double of the Wildcat 6x6 So does that mean bigger is always better? Well when it comes to math, it seems to point that way. But bigger and heavier models suffer from another problem - the Inverse Cube Law. Basically a bigger model needs more structural reinforcments to hold itself together which means it's heavier and therefore needs more power, etc... It's a typical problem in aviation and rocket science. In our case, a bigger model if built efficiently (using frames and such for a light, strong chassis) will generally perform better, but it will also cause a greater load on the individual parts such as suspension components and wheels in the case of my Wildcat 6x6 (when going to quickly over a large bump, the front wheels have a tendency to fall off to to the higher forces in relation to higher weight). So what's the take from all this? I would summarize it like this: If you want a robust, reliable model go light and slower If you want a very high performance model, pack it full of motors, though individual components may suffer more and fail under their own weight. Also remember there are some heavy elements such as steering motor, wheels, tyres, hubs that you will have to use regardless of the number of drive motors - which weight favours being spread among more motors And also that some components such as planetary hubs do come with some inherent friction that will have to be overcome - which again favour it's friction being spread among more drive motors. I'd love to to hear your opinion about this. Also if anyone is interested, i can make a seperate topic/video about the Light 4x4 offroader.
-
How about using a 32054 + 2736? Or use a 5L beam and connect it to the upper and lower holes and use that to hold your pinball linkage.
-
General Part Discussion
Zerobricks replied to Polo-Freak's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
If you post a photo in general help, I might help you to find a solution. -
General Part Discussion
Zerobricks replied to Polo-Freak's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
It's not the strongest of connection. BUT LEGO did release such a part, it's mentioned in this very topic here: -
Wildcat 6x6
Zerobricks replied to Zerobricks's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Having built many models with lots of motors, the bigger and more powerful models tend to have a higher power to weight ratio. Though making a lighter model usually means it's more robust and components are less stressed. Each extreme has it's ups and downs. Indeed, once you go over some 10 km/h, you cana ctually start jumping over small ramps and bumps and it opens up a whole new level of performance. And I think I can make a model that can go even faster, since I have plenty of torque to spare. -
Here's a model I actually completed a year ago in order to be unveiled in time for the BuWizz picnic back in 2021, but we all know how things went... Anyway since the picnic did happen last weekend, I decided to unveil my most powerful offroader. The basic design is based on the Wildcat 4x4, but this version adds more power, a 2 speed gearbox and a third axle to the formula. As with the older version, each axle has independent suspension, plus the entire axle can pivot or swing, effectively giving this model double suspension setup. Indepedent suspension is great at absorbing small bumps when driving quickly, while the axles pivot along the terrain when crawling. The driveline was quite a challenge. In order to transmit the power from 12 motors to the wheels, each wheel ended up having it's own dedicated 2 speed-gearbox. The final driveline is extremely compact and efficient, with only 3 gears engaged at any given time. There are also no differentials or perpendicular drives, so nothing that can break or skip. Each gearbox is actuated by a PU M motor using worm gears, which prevent any unwanted skipping out of the gear. This way each wheel is powered by 2 BuWizz motors via a dedicated gearbox: The following gif shows how the front axle is designed along with the whole model: Here you can wee, how the front axle tilts in order to adjust to the terrain: The rear axles are made in the same way as the front axles, minus the steering. Rear axles are also designed to work in tandem, when one goes up, the other goes down. When one tilts left, the other tilts right. This way the rear suspension is extremely flexible: And finally here are some specs of this beast: Length: 52 cm Width: 26 cm Height: 20 cm Weight: 2,5 kg Top speed: 15 km/h (rounded up) To complete the presentation, here's a video of the model in action, a big thanks out to @braker23, @Sariel and @kbalage for the footage. Final thoughts... this is my most potent offroader to date. The sheer amount of power, torque and speed is hard to wrap your mind around for a model made entirely of small plastic pieces. Having said that, I think there are still few areas to improve: Tendency of the front wheels to fall off at hard bumps - A lighter version would help to reduce stress on the hubs and wheels. Could use a higher steering angle - Would have to find a way to integrate steering racks inside the transaxles. Protection againt depbees and dirt entering the drivelines - Something that would also not reduce the ground clearance, tiles might work.
-
I am pushing as much as I can, so all I can advice is that you send such requests to the support for additional pressure. Unforutnately besides me nobody else in our team regulary checks the Eurobricks forums...
-
Topic is available here:
-
I think 42043 would be a good inspiration.
-
General Part Discussion
Zerobricks replied to Polo-Freak's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
I doubt, it will always be needed as a bevel gear in builds or as HOG handle. -
Zero's workshop
Zerobricks replied to Zerobricks's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
I've been quite busy building professionally lately... ...But I managed to find some time to show this amphibious model I built for the BuWizz camp's cancelled amphibious competition. I also changed the video structure a bit, so I'm actually now showing my face () and talk more in detail about the model instead of using so much text. Please let me know if you prefer this way of presentation of the models, or do you prefer less personal way with more text? Anyway back to the model, as stated in the video, this is not yet a final version, I still have some issues regarding water leakage and steering to solve, but I think it's a good tets model regardless. I will do my best to release updates as I develop the model further. -
I suppose it's because the connectors can slide apart slightly along with the axles and gears. Once you put a beam over them that can cause issues.
-
[MOC] Rigid Chain Actuator
Zerobricks replied to ord's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Simply brilliant! -
Instead of the axle going straight the differential, the differential is longitudally offset along the length of the car, so that the driveaxle can still pass by a centered shock absorber. So basically differential is offset in front or in the back of the wheel hubs.
-
You can always offset the drive axle sideways to solve this issue. Or use 2 smaller shocks smyetrically, like I did in the GTA Spano.
-
The gear itself not, that's why I wrote 12 tooth clutch gear with extension.
-
General Part Discussion
Zerobricks replied to Polo-Freak's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Of course. -
My opinion about this set: Pros: A great step forward in the evolution of the 1:8 supercars New wheels and tyres which allow more stuff to be placed inside New differential gears!!! New panels and shock absorbers Very well defined curves Almost no gaps, with a few exceptions Amazing attention to detail using studded bricks Cons: General lack of innovation... How about a hybrid car with PU driving the front wheels and RWD the gearbox and fake engine? Using the planetary hubs and a couple of motors this is easily doable. I praised new panels in previous point, but this set simply intruduces too many new panels at once. Also why does each supercar need a new fender piece that is than only released in one color? No new innovation with the gearbox, where's the 12 tooth clutch gear with extension and a 24 tooth clutch gear? Suspension system is held only together by friction of the 5L axles, the rear shock absorbers is quite offset from the rear wheel, Wouldn't it be better to just offset the drive axle and keep the shock absorbers as close to the wheel center as possible? Driveline uses new diff, new CV joints on the inside, but the outer CV joints are still weak old type which deform very easily. With the bigger wheels, you could have bigger, stronger hubs with bigger brake discs that accept the new, stronger CV joints to have a new complete robust system. Too extreme color coding, like the lime brake holders for example. On the other extreme I have a feeling Lego changed the colors of the new 12 and 20 tooth gears from orange to blue in order to hide them better in the interrior. Cash grab book... At least have the digital version available for free online. Either way I can't wait to get this set and to motorize it as usual, I already have some ideas
-
Funny thing, I was also watching his review and comparison and yeah... I think I will stick to @kbalage 's much more knowledgeable reviews.
-
[WIP] Pagani Huayra
Zerobricks replied to Jeroen Ottens's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Brilliant idea with the shifter!