

AndyCW
-
Content Count
431 -
Joined
-
Last visited
2 Followers

About AndyCW

-

Lego 8x8 MAZ 543 Chassis Help
AndyCW replied to TheMasterOfLego (almost)'s topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
I'd suggest driving it and improving the parts that break. Expect breakage. Lots of breakage. One thing, that no one else has mentioned is that the cv joints will strip, use this part to correct -
[WIP] Rock-Bouncer RC
AndyCW replied to mktechniccreations's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
That looks much more robust. I'm not sure you need four lower links though. Two upper and two lower are plenty to locate the axle provided they are 'triangulated'. Keep at it. Have you seen Attika's truck with the planetary hubs? -
[WIP] Rock-Bouncer RC
AndyCW replied to mktechniccreations's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
By rotating the links and ball joints 90 degrees, trapping them can be done without compromising the ground clearance. However, it will make things wider and mandate a rebuild. Eagerly awaiting a video of the performance and carnage. -
[WIP] Rock-Bouncer RC
AndyCW replied to mktechniccreations's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
This thing looks awesome and will give you a lot of enjoyment. Having built many similar vehicles, I can give you a couple of heads up on what to expect as you test and develop. The links will pop off of the ball joints unless you 'trap' the link and even then it will still happen a little. During suspension droop, the springs will separate from the chassis. They only appear to be connected via the friction of the 3l axle into the top of the spring. Incorporate the side mount on the spring as a retainer and not as a stressed item. You will overheat the motors. My buggies with 4x 5292 and 107mm tires overheat the motors on anything less than 4:1 overall from the slow output, but I run 3 cell Lipo and with lower voltage, you may have some success. -
3 Speed automatic transmission gearbox instructions
AndyCW replied to TechnicBrickPower's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
This is awesome. So many people show how they built something, but not how it works. -
[help] Front axle for military truck.
AndyCW replied to Mechbuilds's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
I built something that has a very similar axle layout. Check it out for ideas on how to connect to the chassis. -
Portal hubs - a nail in their coffin
AndyCW replied to Leif's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
There are ~11 tires that fit your requirements from RC4WD alone. ttps://rc4wd.com/go/rc4wd-tire-finder/ Happy shopping -
Portal hubs - a nail in their coffin
AndyCW replied to Leif's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
You might want to work up to those tires incrementally. Each step will show you what may be required for the next. Envision fitting 94mm tires first, this will show you some of the difficulties in fitting 107mm ones. It isn't just about the tires, it also is about having room for steering and those portal hubs are going to multiply the required amount of room. Alternatively, you could remove the body from the Landrover, install the desired tires, then see what can be parts of the body can be reinstalled. Those fender flares definitely will not fit unless you lift the vehicle a great amount. -
The Handful of Buggy 4x 5292
AndyCW replied to AndyCW's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
'Unrestricted' may have been hyperbole. The motors have not been altered. The motor controller can sustain 12 amps indefinitely and can burst to 24 amps. I have not had any problems with the controller thermally limiting the motors or the motors thermally limiting themselves. Some potential explanations for why the motors are not thermally limiting themselves: motors exposed to airflow, not buried inside of the MOC ambient temperatures low 1.8 gear ratio off of slow output low weight lack of traction -
The Handful of Buggy 4x 5292
AndyCW replied to AndyCW's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
I'm using a non-lego solution. https://www.dimensionengineering.com/products/sabertooth2x12rc It is inside of the orange 3d printed box in the center of the chassis. It is in turn connected to a 2 channel 2.4ghz radio controller. -
The Handful of Buggy 4x 5292
AndyCW replied to AndyCW's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
During one of the test runs, before we got out the camera, the front right hand shock mount sheared right off the spring body. This is why the springs are mounted by the vertical central cross axle hole. Looking closely, in some of the pictures, the damage to that spring is visible. I didn't have another spring easily available to replace. I think my next creation is going to be another rock bouncer with the same power, but less weight. -
The Handful of Buggy 4x 5292
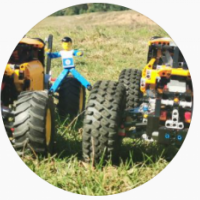
AndyCW posted a topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Hello All, It has been ages since I shared something on here, even though I visit daily to see everyone else's builds. However, 'recent events' have given me more time to build. I haven't been idle these last couple of years, but nothing I made rose to the level of sharing. The following buggy has four unrestricted 5292 motors, at 12.6 volts, going to the rear wheels and only weighs 1400 g. This makes it hard to handle for the inexperienced driver. The rubber bands on the rear control arms keep the ball sockets from coming apart. The lower arms are different from the upper ones due to the change in position of the joints on the swing arm through the suspension cycle. This also creates a rather nice camber curve. I also discovered a weakness in the stiff springs. The upper mount will shear off of the side of the shock body if it is used. Many of my shocks have stress fractures there. I've got to clean the thing up now, it is covered in mud. I wonder who did that. Question, concerns, comments, or relevant war stories? v/r Andy -
[MOC] RC Red Buggy
AndyCW replied to 1980SomethingSpaceGuy's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
I like the stopper pin on the battery box switch -
[MOC] THE VIRUS - UTV Concept, with instructions
AndyCW replied to agrof's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
I'd hazarda guess that the next couple of months are going to be productive from MOCing perspective. This seems like an ideal candidate to try to stuff buggy motors into. -
Lego Chevrolet Silverado K30
AndyCW replied to filsawgood's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Reminds me of an old rusty forestry service truck. The US Army used these too and they can be found fairly cheaply at military auctions. An underbelly shot would be appreciated.