
896gerard
-
Posts
115 -
Joined
-
Last visited
Content Type
Profiles
Forums
Gallery
Everything posted by 896gerard
-
42083 - Bugatti Chiron
896gerard replied to Jurss's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
People, Can we stop moaning about the Chiron please? It happens to be good at looking good, which is exactly the only thing it was intended for. The extra price you pay is not for parts or for extra engineering, but for the extra good looking box, the presentation of and images on all the small boxes inside the box and the license Lego has to pay to use the Bugatti branded stickers. I like the idea very much of new parts being presented first in halo models like this, the Porsche first and the Bugatti second. Moreover, perfection is not a common thing for current Technic sets. Most large Technic models look like they had more parts in initial phases but were robbed of parts to make more profit. But there are gems that have looks ánd functions. To my opinion, the coming 42082 fits in the list of the 8043 (Excavator), 42009(Mobile Crane MKII) and 42043 (Arocs) regarding complexity, looks and functions. I think the Chiron gives us many great parts & opportunities. Please consider: there is no Technic set without error. The 8043 had appalling main arm lift power. The 42009 had ridiculously weak outtriggers. The Arocs had immensely heavy steering. I would say to you all: accept it & try to improve it with your own hands, because larger Lego Technic models simply have their mistakes. But if you want to buy new stuff, that is what you get. If you don't accept it, buy the parts and try to build something better. -
42083 - Bugatti Chiron
896gerard replied to Jurss's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
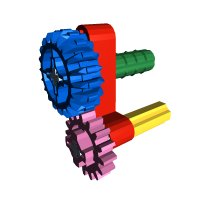
The internals of the 20 clutch gear are very much like the internals of the new (red) 16t clutch gear. -
42083 - Bugatti Chiron
896gerard replied to Jurss's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
The new Chiron 'wave gear selector' allows for a very small 2-speed gearbox that only requires one 'axle level'. Previously, the red selector always had to be horizontal with its axle sticking vertical, or placed vertical with an axle 3 studs higher. The gear selector axle is now in the same direction ánd plane as the drive axles, which saves an enormous lot of space for cramped designs. I wouldn't be surprised to se the new selector in every new set that uses clutches. -
42080 Forest Harvester
896gerard replied to Ngoc Nguyen's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
I remember having seen a 3D view of the new pneumatic switch somewhere on Eurobricks, but can't remember where... Anyone a clue? -
Considering the place of the H pattern gearbox and the off-center battery box placement, the XL motor is in the left-back of the superstructure. Lego never uses an extension cable and a gearbox with these loads should have the PF motor close to it.
-
It just resulted in that, was not really designed for it, but anyway, it simply did them with great consistency...
-
As a last goodbye to 2016, I present this small red car. It is not really built to be particularly good looking (I used a wire bodywork to have a low weight) or to have a particular high speed. But what it does, is put a smile on your face. Technics are kept simple, there's an RC buggy motor next to a PF lipo batterybox in the middle, a PF medium steering motor before the front axle and an IR V2 receiver to enable 1 metre of infrared range when going outside. Please Lego... Please... do something about it. The frustration and anger about this appalling range is powering companies like S-brick. And that's why my future cars are having an S-brick, leaving this model as one of my last PF IR remote controlleds MOCs... We're making a fun car, right? So there is a silly spoiler and huge rear tires. By the way, these wide tires provide excellent traction in dry conditions, which is important for low-weight cars like this. The interior had to be sacrificed to have a low position for the drive motor and battery box. Because of this measure, the handling was quite good, but made much worse by the slow PF IR remote. In the end, of course there is the video: The longer story can be read on MOCpages and better photos are on Brickshelf. Have a nice 2017!
-
Good thinking! Off course, I was considering using the large tracks but.. the rubber parts added onto plastic tracks did not convince me (expensive, relatively low grip). Can you put a link of that poster here? Please note that I've cracked 60 degrees on a bathing towel. I'm not sure that plastic tracks with rubber mounts on it will grip onto that quite smooth surface.
-
No, I don't modify Lego batteries. Please note that this battery only puts out 7,2 to 8 Volts, so you could say that (, compared to all Power Function Technic sets), this MOC was even underpowered... The problem is that the Lego Technic group does not use the full potential of their M motors in their models. This oversizing of power is done because most builders (children etc) are generally bad builders and have way more friction in their transmissions than us. This habit of TLG makes us believe that M-motors are weak. I'm swimming against that tide, and you can see which great engineering can be achieved with that ;) Adding an XL motor in the front would make the center of gravity higher, as the XL motor is higher. Then there is the difficulty of having the drive axle through that complex joint. And why do it? When you have a look at the video, you see that always the available torque is more than enough: always it looses grip rather than stalling. The only reason why you would want bigger motors is to make it faster. But let's not forget that the main goal was: climbing the steepest hill. Having a bigger motor would increase weight, which decreases the climbing angle. Having said that, even the M-motors supply already a very reasonable speed (the video is not speeded up), so I think my choice for M-motors was one of my best 2016 choices.
-
Well, you can tell now that you've build a Technic model with 16-legged-drive... 16LD instead of 4WD Great job!
-
You are right. It felt unlogical to me too when I went outside for the first time. But I think, if any Lego Technic MOC has to survive in severe conditions, it has to be this one. I have not posted this image to Eurobricks yet, but as you can see the Quattrack can be equipped with a cargo bay. I can invent myself a battery heating system for in the cargo bay, in which case it can survive snowstorms, as electric motors do their work in extreme colds, as long as they don't freeze. The tracks then provide grip to let it rescue itself ;)
-
It was only 15 minutes outside. From my electronic engineering background, I think that all electric motors should be able to handle moist air. The Lego electric motors are more protected (have plastic around them) than the starter motor in your car, and still it starts every morning.
-
I'm not really sure about that, as the ridges and edges on it are smaller than for the standard Lego tread. It will be better on smooth surfaces, but on rocky surfaces (that I simulated), the standard tread will be better. Another problem of these custom treads is that they take more volume (thus are heavier) and need a least some torque to rotate, which is an energy loss. So these 1x2 parts do not allow for a lightweight, light powered design.
-
It proved to be very difficult to make the actual joint higher (I have considered this problem off course), as the complete chassis structure would have had to be lifted a bit for that. And then the shock absorber would be much higher and so on. I would have ended up with a vehicle that can leave very steep hills more easily, but the main focus was climbing. And for climbing, the lower center of gravity is essential. It's all about priorities. The front is already very packed, there is no space left. Futhermore, it is way more important to have the main weight (yes, in such a lightweight model even the lipo battery box is 'heavy'..) on the axle line, to have it low. Having the battery box in the front would cause the front to be very long and out of proportions. And think about the weight on the rear tracks. Some weight needs to press them down, otherwise there's no mechanical grip. The main point of this MOC is the continuous fight between grip and gravity, remember? ;)
-
Already two years ago, I got inspired at defeating steep hills with the LiteJeep. That could already beat 50 degrees, but because of its high riding height (good for offroading) and relatively heavy PF L motors, I reckoned there would be more irons to put into the hill-climbing fire. Very important things for hillclimbing are sufficient grip, huge power and a low weight. Weight ultimately gives more grip, but it also causes the vehicle to flip earlier when it is located above the center of gravity. With these factors into the equation, I decided to create a vehicle with loads of grip, so with 4 rubber tracks, and with articulated steering to make a sturdy connection between right and left possible, which is essential for climbing: when any vehicle is climbing, the suspension does unexpected things, so a stiff frame and suspension setup are required. Lightweight design requires a low complexity too, so that is why articulated steering is chosen. Having a front and rear part to let the vehicle adjust its shape to the terrain is an option I used several times in my rubber-tracked vehicles. This is the first vehicle in which I used the maximum footprint instead of the triangular form, again for maximum grip. Please note that, when you choose for the sturdyness and simplicity of articulated steering ánd want to let it adjust to the terrain, the middle joint becomes very complex as it contains joints in two axes! There is always a place where pain comes back. The Law of Conservation of Pain holds here.. In this case, all the trouble was in the difficult joint, which took about 5 hours alone. Then for the power: initially an XL motor was used in the front, but having a driveshaft through the already complex dual joint proved to be impossible. And then the idea came. Why not generate the power at the place where it is needed? Why not, if there are two separate parts, have some powerplant in both front and rear? But then there was a problem: I have a very large project in which all my three L motors are used. This pushed me in the direction of using M-motors, which proved out to be a very good forced choice. Combined with the lightness of the overall model, they proved to have ample torque left with a 3:1 gear ratio, having enough torque to keep the four tracks spinning all time when grip was lost. This is amazing, and you can see why Lego has put two M motors in their latest Tracked Racer. But the limits of that thing are way lower than the Quattrack's limit. Using two PF medium motors for drive and one for steering, this one of my very few (and maybe the last) Lego Technic MOC with only 2006 components. The Sbrick will throw all range headaches away and have much less delay than the stone-age PF IR remote it is replacing. Why did I use such standard power functions components? The new PF servo is slow and quirky, a medium motor allows for much more smoothness in steering. Moreover, if you are driving at steep slopes like this, it asks all your concentration to keep it on the move. If you cannot feel where the remote control knobs are (The intrinsic problem of the Sbrick) the vehicle will fall of before you've compensated. So the old system proved to be the best system in this situation. The articulated joint actually contains 3 joints, to have a suspension force on it in both directions: up and down. That is why there are rubber bands and one shock absorber. By the way, also the steering joint is included. Now, because the front and rear part of the Quattrack are relatively conventional (no steering nor differentials), all the pain of good and accurate steering is shifted to the design of this central joint. I dare to state that the success of this vehicle relies for a big part on this 2D joint. In the video, the operation is explained. On this photo, it looks as if the ground clearance is half a stud. This is not the case; in fact, it is over 1 stud. The underside is very smooth, which helps the low superstructure to glide over obstacles. Because of the weight saving, I designed it to have very clean looks. Styling means more weight. However, I managed to squeeze in some little details like fake cabin flashing lights, front lights, rear lights, cabin seats and a steering wheel. The reason why I did this, is that I wanted it to be a possible real-life vehicle as well, not just a scientific experiment. Adding weight is bad for climbing ability, so I tested the Quattrack also with the cabin removed and say what !!? The climbing angle was the same. This front look shows all that. The Quattrack contains everything, but nothing more. You do not need a zillion pieces of Lego to break records. Only 556 grams of it is sufficient in some cases. The video is the proof of all my theories... [media] I have not put all text and photo's on Eurobricks. More is to be found on Brickshelf and MocPages. If you like my video's, you might want to take a look on my YouTube channel.
-
I did do literally no thinking about the name.. it just came up. I wrote the words out and I was like: Oh it is A - B - C - D, that looks nice to put above the video... Good idea for the Rebrick contest! I didn't know about it..
-
Yes, the main photo is already deeplinked, but to do it for them all... is a pain. Only I did not know that it was called deeplinking what I was doing...
-
Sometimes, you have annoying things on a birthday party and with this MOC, I tried to solve at least one of them... For higher-quality images, click http://www.brickshel...ry.cgi?f=565441 (The first day, it's never public, which is strange) [edit]: MocPages link: http://www.moc-pages.com/moc.php/431271 for better quality images.. The video explains all trouble and how I solved it:
-
You are right about the steering angle... but actually my prototype system was designed to activate the extra traction control system only when the steering angle of the front wheels was large enough (this is caused by the slack that exists in every U-joint, and I used 2 of them...). And that is why you found the return-to-center rubber band above the red clutch arm. And I agree: this is quite a binary use of the system but.. it worked! There are so many systems on Youtube that never leave the studded plate or see daylight..
-
Nice.. but I never trust clutch gears. Those are huge forces, note that they are used to turn a complete car! And the first things that will give up, are clutch gears (I think they'll also wear out but that is for another topic). Well, if the mechanism has to become sophisticated then why not fit simply 4WD instead... Anyway, your method of measuring the error precisely (mechanically) would maybe not succeed, as the wheels have no grip so they do not deliver an accurate measurement. And remember, there's nothing wrong with the speed ratio being a fixed ratio, as the distance between front and rear axle and the turning circle do not change for the complete car lifetime. The problem is: getting it exactly right and that might be difficult to realize with the limited number of Technic gears. Maybe using one more differential would do the job but this is very difficult stuff to think of. And I like building creations as much as doing ideas like this so now it's time for a lot of MOCs again..
-
Well, I didn't just post this to say: 'Now this is the final solution' but more: 'This is the first step, now the whole internet can start improving it'... So I'm fully happy if this actually is improved.
-
I know, I know.. the good old proper Technics are being replaced in a high pace by the everything-able-to-do-Sbrick. But let's not get lazy, right?
-
I like your idea very much... but with the coming of that gearbox goes the simplicity and the smallness of my solution. And Technic builders like smallness as a lot because they fit other systems as well, and these usually need to be exactly 1 micrometer above the rear differential... In every corner, a car has a fixed speed ratio between the inner and outer wheels. Normally, the differential sorts that difference out for you but on ice that is gone. So if you can replicate this exact ratio with the limited Lego gear range, there are no problems at all. Well, there is some 'control', the wheels spin on defined speeds where with an open diff they would spin on undefined speeds. I like all the ideas here on Eurobricks, maybe a great version 2? Yes, that would maybe work, but as soon as you use more than 2 differentials the rear end of your 'car' is becoming elephanty. And then it's better to go for the good old 4WD...
-
Four wheel drive on Lego Technic cars with small wheels is hard to realize, as they become relatively too wide (which is ugly) and the ground clearance is also compromised. The problem then is: how to get the same grip back with only rear wheel drive? Then you need to push something 'extra' in the back of your already crammed, small nice-looking vehicle... This concept is an approach to keep this 'something extra' as small as possible while giving awesome and unexpected grip to the car. (At least, I was astonished by what it achieved!) Instead of typing a lot, I've put it all into a video with the theory of how it all works at the back of the video to let the 7 billion minus 1000 viewers that are not interested into more advanced Technic stuff experience how it works in practice on a 2 cm (that is: inchy) thick ice floor. As for the car, it is built from Power Functions spares as all my L-motors (which have quickly become the main workhorse for every Technic builder) are ehm... in use. That is why you find me using a geared up XL motor, which gave me memories of the good old times when the poor knob wheel parts splattered around. Sharp images of the car and mechanism explanation can be found on: http://www.brickshel...ry.cgi?f=564319. On MocPages (beware, there is a piece of code there that simply destroys anything such as image resolution on .png files...) http://www.moc-pages.../moc.php/428881 Video: I finally have found PovRay so (with many thanks to all those who make that software) I can present a high-quality render:
-
[MOC] Koenigsegg One:1
896gerard replied to Pvdb's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Are you listening, Hall of Fame?