
Jim
-
Posts
17,203 -
Joined
-
Last visited
Content Type
Profiles
Forums
Gallery
Everything posted by Jim
-
I'm definitely with you on this one. I have started making a frontpage tool. This makes it more easy for us to frontpage a MOC. This is in the Proof of Concept phase. What I would like to do is make something that automatically frontpages a topic which is featured. Featuring a topic can be done by more people than just staff (if I am not mistaken. If so, we can create roles for that), making the frontpage much more active.
-
[BRICKPI] BrickPi General Discussion
Jim replied to Jim's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
I just ordered a bunch of Raspberry stuff (LCD's, camera and some accessoires) to go with my BrickPi solution. When everything arrives in two or three weeks I am all good to go. Toorrow my Wifi dongles and Micro SD Cards will be delivered, so I can start testing different communication scenerarios with my EV3 units. I need to make checklist of PoCs (Proofs of Concept) to complete. BlueTooth brick-to- brick Wifi sockets brick-to-brick-via-lan Daisy chaining (depending on ev3dev) Websockets (sending commands from a webserver to the brick) ... -
Sweet! I knew there had to be a connection to ev3dev somewhere This is what I had with .NET and Java versus Python. And you know how that ended hehe. Looks like something we can give a go together. I have invited my buddy to this forum as well and he knows a lot about AWS.
-
I stumbled upon RoboMaker on AWS today. Well, a friend sent it to me. https://docs.aws.amazon.com/robomaker/latest/dg/what-is-robomaker.htmlhttps://aws.amazon.com/blogs/aws/aws-robomaker-develop-test-deploy-and-manage-intelligent-robotics-apps/ I need to check out what it actually entails, but it seems to fit the cloud services scenario you are talking about. It is using ROS (Robot Operating System, so I have no clue whether it can be used for LEGO robots. But it might be an interesting read. Your code can make use of AWS services such as Amazon Lex, Polly, Amazon Rekognition, Amazon Kinesis Video Streams, and Amazon CloudWatch to build a sophisticated robot brain, accessible as a set of packages for ROS (Robotic Operating System). You can also build and train Amazon SageMaker models in order to make use of Machine Learning in your robot brain.
-
EV3-PD Protocol Droid
Jim replied to MajorAlvega's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
I stumbled upon RoboMaker on AWS today. Well, a friend sent it to me. Edit: Created a separate topic for AWS RoboMaker and ROS -
EV3-PD Protocol Droid
Jim replied to MajorAlvega's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Interesting. Thanks for posting. I will take a closer look tomorrow -
[BRICKPI] BrickPi General Discussion
Jim replied to Jim's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
I’m definitely your guy Let me know how I can help you. Create a new topic or send me a PM, when you feel the time is right -
[BRICKPI] BrickPi General Discussion
Jim replied to Jim's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
I have never thought of using Python for my robot(s). But I can (and will) definitely recommend using Python in combination with the EV3. I would prefer using several EV3 bricks and work on a pure LEGO robot (besides the Rotacaster wheels), but given the power and possibilities of the Pi-BrickPi combo, I would be stupid not to try that. Of course, I can still use the EV3 bricks. So many options It's always good to have someone with no prior knowledge to work with a certain firmware/programming environment. I'm glad I can add some value to the project that way. I just made an authenticate request on my Web Api. The Api returned the JWT (Json Web Token), so I can start making authenticated calls. I am working on a GameHub Api for my mobile games (one of my other hobbies), so I can use the robot to test the Api. This means my robot can send highscores to the server (of course this allows for various other implementations) -
[BRICKPI] BrickPi General Discussion
Jim replied to Jim's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Wow, so easy. And it is getting even better. The last days I have fallen in love with Python and ev3dev Thanks for the response. I love the fact that you guys are around to point me in the right direction I am so psyched right now. Can't wait for my Pi's to arrive. -
[BRICKPI] BrickPi General Discussion
Jim replied to Jim's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
When you stack multiple BrickPi's, you need to enter the ID's in the config.txt. http://docs.ev3dev.org/en/ev3dev-stretch/platforms/brickpi3.html#setup But how do you address the different motors in the Python program? Where can I find examples/documentation for stacked BrickPi's? I basically have this question: https://github.com/ev3dev/ev3dev/issues/910 -
I just bit the bullet and I ordered two full BrickPi3 starter kits, so with two Pi3's. This gives me the option to test with robot-to-robot communication and I can stack the BrickPi's so I have all the ports I need (for now hehe). Really looking forward to testing these babies. I am also still interested in the daisy chaining solution btw.
-
I'm making progress quite fast and I had zero knowledge of Python and Linux.
-
[NXT] Modified HiTechnic Segway
Jim replied to djm's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
This is very interesting and informative post. Thank you for sharing! And I really like what you did with the different colored segways. The devil is in the details -
This problem has been solved too. Of course, a simple reboot did the trick.
-
Thanks! That almost did the trick. Had to install pip3 first. So I ran this command to update the packages: sudo apt-get update And then this command to get pip3. This did take quite a while (about 15-20 minutes). I was under the impression that the entire python3 sdk/runtime was installed on my brick again. sudo apt-get install python3-pip And then this command to install the requests package sudo pip3 install requests Working like a charm! Now is probably the right time to start a generic Python course. I am getting really enthusiastic about Pyhton. And about Linux...for the first time in my life I have just been able to call my .NET Core Web Api from my EV3 brick!!
-
Sweet! That's working like a charm. I know this will be a journey with a lot of testing, trial and error and asking for help, but I really do like the setup so far. I love that I can access my brick and use it as a real client. Hehe no problem. Your help is appreciated and you just fixed two of my issues. I would love to be able to consume my own Web Api. That will open up lots of cool options. I do see a lot on info on how to consume a Web Api, so that won't be a problem, as long as I can get the requests library available on the brick. @dwalton76 any help on that would be appreciated
-
Another question; is it possible to use the requests class in the EV3 bricks? https://code.tutsplus.com/articles/how-to-use-restful-web-apis-in-python--cms-29493 Traceback (most recent call last): File "/home/robot/vscode-hello-python/hello.py", line 8, in <module> import requests ImportError: No module named 'requests' Ahhh yes, of course. That makes sense. Maybe I accidentally added the 4. It's working again, thanks.
-
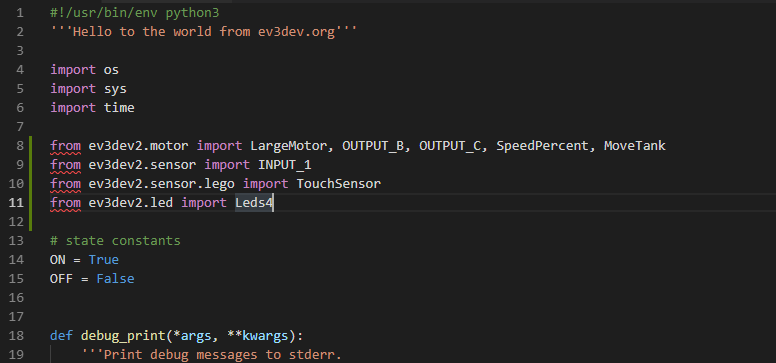
I suddenly get pylint errors. Strange thing is that the led is actually causing an error. When I comment out the led statement, the program runs fine. And the funny thing is that the other day it worked with the led statement in the program. I see in the readme todo "explain how to get code completion working". Can you tell me how to do this? Sorry for all the questions, but I need to find my way around Python.
-
I have edited the hostname file in etc with sudoedit from ev3dev to EV3A, but it still shows ev3dev in Putty and in VSCode. Any idea why? Admittedly, I am a Windows man, so I really need to find my way in Debian. But I do like the challenge. Can you recommend any (visual) tools to browse the brick, instead of SSH commandline with Putty.
-
Join me on my Python journey! There’s quite a bit of support here, so we can make it happen.
-
I will check out your answer about stacking brickpi's later (thanks a lot), but I am definitely interested in the "multiple brick communication", so I will come over to ev3dev-lang-python and give it a go. I must confess that I have zero Python experience, but I am a pretty experienced software engineer, so maybe I will be able to contribute
-
Ev3basic is very nice!
-
Technic 2019 Set Discussion
Jim replied to dimaks13's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Bear in mind that these are the 1H sets. Go to Brickset and browse the previous year’s 1H sets. You will come to the conclusion that they are seldomly very technical and function heavy. I absolutely agree Technic should be about functions instead of licenses, but I do think it’s okay for these sets and I expect the more techinical sets will appear in the 2H wave, like the usually do. -
More importantly; can I change the name of my brick? If I am not mistaken it is called ev3dev now and since I will be using multiple bricks, I like to call them EV3A, EV3B, EV3C and......EV3D My next step is to setup communication between multiple bricks. Ideally, I would designate one brick (EV3A) as the master and the other three as slaves. The master is the brain of the robot and the slaves provide sensory information and operate certain functions/motors.
-
Yeah, it worked out nicely yesterday. Accomplished the basics. The Asus N10 Nano looks great....well the price does. Thanks, I will get me some of those. I probably need to get me something like that for my big robot project. Let's say I want to connect like 16 motors (or a big number); how can I connect the EV3 motors to my pi3? I see the Brickpi has several outputs, but I do need a lot of them. One option would be to use multiple Brickpi's, but maybe there is a better solution. Some of the motors can be multiplexed, but not all of them.