07jkearney
-
Posts
84 -
Joined
-
Last visited
Content Type
Profiles
Forums
Gallery
Everything posted by 07jkearney
-
 Madoca has posted a variant of his SUV, outstanding as always:
Madoca has posted a variant of his SUV, outstanding as always: -
It does work, but is difficult to integrate into a full program, I was wondering if their was a more concise way of achieving the same thing.
-
Here is a good tutorial on making a proportional steering remote with another NXT (connected via bluetooth): http://nxtprograms.com/NXT2/steering_remote/index.html
-
It drives me insane that it's so simple in NXT-G, all my equivalent NXC programs are ridiculously complex
-
Funny that such a simple action cannot be achieved simply in NXC, I think I'm going to concede defeat and use another solution. Thanks for the help anyway guys
-
Neither are on the UK shop at home yet
-
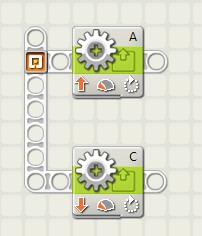
Just tried using PID, but the program quickly became overly complex, and I can't get it to work properly How hard can it be to translate the attached NXT-G code into NXC?! Everything I've tried has failed.

-
Nice idea Jim , I'll see what I can come up with.
-
Unfortunately I would need a separate 'RotateMotor' function for each motor (because they need to turn different distances) and the second rotate motor command would wait for the first one to finish executing I am currently redesigning the hardware to avoid this issue.
-
What I was trying to do was move two different motors, at different speeds, through different angles, simultaneously. Thanks for trying to help though P.s. That tutorial was how I leaned to program
-
Many thanks for your excellent reply, unfortunately I have already researched and attempted to use the 'RotateMotorEx' function, and, while useful for a typical two wheeled robot it is not suitable for what I have in mind to the best of my knowledge;
-
Laurens Valk has made a robot that grabs and lifts using only one motor, perhaps you could use it for inspiration?
-
I have recently begun programming in NXC, and while very useful, I cannot for the life of me figure out how to move two motors simultaneously (with different required movement angles). Below is the simplest way of doing this that I can come up with, can anyone suggest how to integrate this into my program? Or do you have an easier way of achieving the required actuation? Also it would be great if the motors were synchronised, but this is not essential.
-
This sounds like a very viable idea, the modularity would allow you to make a variety of different courses, as well as the obvious storage benefits.
-
[bUMP] Madoca has posted a video of his "LEGO Technic SUV Mk" which includes: "2 hard-coupled XL motors for driving. Servo motor for steering. M motor for height adjustable suspension. M motor for 2 speed gearbox." Building instructions have also been provided for this very impressive model
-
Piston
07jkearney replied to legomania94's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
A simple check on bricklink shows that this part is only available in dark bluish grey. -
[LDD MOC] Custom BMW R100
07jkearney replied to darsedz's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Looks great But are you sure that the rear wheel will not hit the bodywork when the suspension is compressed? -
[bump] Just phoned customer services to see if they had any more information concerning the release date, (actual quote): "I can't give you an exact date, but the newer power functions components should be available on Shop @ Home extremely soon." Not sure whether I believe this in all honesty.
-
Without a doubt not entering the most recent technic challenge; free 41999 sets for the top 100 entries! Grrrrr
-
Effe's MOC Corner
07jkearney replied to efferman's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
This works because the switches are connected directly to the battery pack(s), thereby circumnavigating the receiver. (Which causes the problems) Edited for grammar -
Granted, in the video the mechanism does appear to function as a clutch, but in reality the gear ratio between the input and output is changed by variation in the angle of the red technic ball joints, and, as Hrafn stated above:
-
Wow! You have done amazingly well to translate this concept into bricks so compactly
-
H3t (WIP)
07jkearney replied to Jeka Jackson's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
That hummer is an absolute monster Great job on the body -
Micro Crawler
07jkearney replied to VKTechnic's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
picture shows up fine to me Great job Victor! -
Wrong I'm afraid, the probability would be (1/20000)*(1/20000)= 1/400000000 assuming that the numbers are chosen randomly and independently of one another