
TasV
-
Posts
152 -
Joined
-
Last visited
Content Type
Profiles
Forums
Gallery
Everything posted by TasV
-
 Can I make a suggestion? If you make a change to the rules can you please make them a colour other than black so it immediately stands out?
Can I make a suggestion? If you make a change to the rules can you please make them a colour other than black so it immediately stands out? -
3 separate gbc modules? MODS or just MOCS? Third party NXT/EV3 sensors?
-
Lego Technic Clones
TasV replied to imajor's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Interesting suspension idea in the lime green one. -
EV3 M motor vs PF M Motor?
TasV replied to TasV's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Thank you, Philo. I look forward to seeing the results of your tests. Will you publish them here or on your website? -
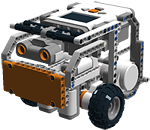
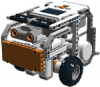
We finished the grab/lift mechanism. I apologise for the crappy video... Ipad videos are hopeless. It uses just one medium PF motor at the moment. When the new medium EV3 motor arrives it will take its place. The robot is not finished yet and is not programmed to do anything except loop through grab, lift, lower, and open, just to test the mechanism. It doesn't lift all the way to the top at the moment either. Ramacco, we decided not to use the worm gear setup as it slows the whole thing down dramatically (with the large NXT servo motor... with the M PF motor it speeds up dramatically) and have attached the motor the same way you did (I think) in your first model. Thanks again for your assistance. Your plans were excellent. The power is just on 60% at the moment. We'll probably drop it back to about 40%. It's very quick and uncontrollable at 100% power. Eventually it will have a touch sensor at the top of the lift to stop the lift. Other robot specs are: 4WD skid steer, touch sensors x2 at the front to detect collisions, two omniwheels at the rear (lift is at the rear of the robot) to support the lift. It will have ultrasonics attached to the back and another brick mounted eventually as well. The colour sensor under the lifter is to verify the can it has to lift up and red platform it has to place the can on.
-
EV3 M motor vs PF M Motor?
TasV replied to TasV's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Thank Jim and Philo... you guys are legends! Is stall torque and maximum torque the same thing? My understanding of this is that the stall torque is the torque (force) when the rotation of the motor = zero. Is maximum torque the same thing or is it running torque? I think max. and stall are the same thing. Should the PF max torque units be Nmm instead of mNm? Isn't Nmm just Newton millimetres? If so... the EV3 motor has a stall torque of 12N/cm and the pF a max. torque of 40Nmm... which is 4N/cm??? yes??? So... it generates more torque than the PF M motor (which I would expect with fewer RPM too). -
Has anyone had a chance to compare the new EV3 M motor to the PF M motor? If so how does it compare in terns of power and RPM? How does the size compare to the M PF Motor (I have an EV3 M motor on the way to play with).
-
Shapeways Custom Lego Parts
TasV replied to TasV's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
I was actually meaning of the newly made parts :) -
Shapeways Custom Lego Parts
TasV replied to TasV's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
I was a little confused about the tight fitting holes in the liftarms so I did a double check on the size of the holes. The size of the holes in the schematic I found showed the holes to be 4.8mm in diameter. That's how large I made the holes in the plans. I grabbed a 1x15 liftarm and measured the actual diameter of the hole and found this: The actual size is smaller than what I made it. Jim, do you have any Vernier Callipers? If so, would you be able to run them over the liftarms to measure the diameter of the holes. The other dimensions were 7.76mm wide and 7.38mm high (hole sides facing out). I'd be interested to hear how accurate the printing is. It states it somewhere on their website but I can't find it atm. EDIT: I found it... they state is it ± 0.15mm -
I have some photos on here somewhere in this thread of the Losi Rock Crusher Micros on lego rims... they fit nicely.
-
Shapeways Custom Lego Parts
TasV replied to TasV's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Did you read how they make the metal ones? It's really interesting! They first print the model in a special wax and then cast the wax model in a plaster mould which is baked in a furnace to melt off the wax, leaving behind the mould into which molten metal (silver, brass or (I think) stainless steel) is poured. Once set the plaster mould is broken away and the piece polished (which might help expand the holes a bit). My brother-in-law is an industrial designer... I'll ask him if he knows of mould makers that might be able to do it. You know what would also be interesting??? Using a CNC router to cut the pieces out of something like acrylic. I have a CNC router at work and some small 1.5mm ball nose and end-mill router bits that might work really well on it. -
Shapeways Custom Lego Parts
TasV replied to TasV's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Thanks, Jim. I was hoping for a more 'polished' finish from the polished material, but I guess for something as small and fiddly as this it would be hard to polish at all. I think I will try the detail plastic and see how that turns out too. It would be interesting order one of the $$$$ metal finishes that are meant to be smooth and then make a mould from it that could be used to cast pieces in ABS plastic of any colour. -
Shapeways Custom Lego Parts
TasV replied to TasV's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Cool... thanks Jim :) -
Shapeways Custom Lego Parts
TasV replied to TasV's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Any chance of a photo or two? -
Shapeways Custom Lego Parts
TasV replied to TasV's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Awesome...I had a guy contact me today asking me to make the 1x16 liftarm available for sale... I told him they were currently being tested and I had no plans to offer them for sale until they were fully tested. I'm most interested, in no particular order, in the quality of the finish, their strength, how well pins fit, and how well they fit with other pieces. How does the alumide one look??? On a related note... I use powdered aluminium at work at times and it is very dangerous stuff. If you have young kids I would not be letting them near the alumide pieces. -
Thank you for the plans, Ramacco. That method of delivering rotation to the lift/grab differential is quite ingenious!
-
Ok... I've made a few little mechanical models of grabbers with differentials and can get it to work... but I am still stumped by a few things. The first is related to your 2nd video, Ramacco, that shows the mechanism in manual mode, without the motor. The grabber starts open and then closes before the lift starts because the load on the grabber is less than that on the lift. Once the grabber is closed the load on the grabber reaches 100% and the rotation is transferred to the lift. The lifter lifts the grabber off the ground and here is where I am confused. You wind the mechanism backwards and I would have thought opening the grabber would have less load than dropping the lifter but the lifter drops first and then the grabber opens. Is the load going down, on the lifter, different to the load going up on the lifter (due to gravity I assume)? I'm also confused about how you simultaneously supply rotation to the lift and the grabber whilst the whole mechanism is changing height without changing the height of the motor. And lastly, your action is slightly different to what I have to achieve, however; I hope it will still work anyway. In Premier Rescue you have to lift the can up (that's fine) and then locate a platform and then drop it down. Yours picks the can up from one level and then drop it back down in a different place at the same level. I'm hoping that when the can is placed down on the platform that this makes the load on the lift exceed the load on the grabber which then causes the grabber to open. I think it will... I would love to look at your instructions to confirm the ideas we have and to help clear up the confusion. Thanks, Simon
-
Hi Ramacco. I was sifting through the 100's of emails on my work account the other day and actually found an email from you that I had missed. I was going contact you this week because I'm on 2 weeks holidays to thank you for your email. I get 30-50 new emails through my education email account every day so I apologise that I missed your email; sometimes I just don't see an email. It's a lousy system! If you PM me through the Eurobricks forum I will get it because I get the notification to my home email address. My robotics boys went on to compete in the state Robocup finals and we came 1st, 3rd, 4th, and 5th (my Son came 3rd) and then one of my boys went to the national finals and competed in senior rescue and came 8th in Australia and then also competed up in premier rescue and came 15th in Australia. So I'm very proud of them and am looking forward to next year.. which is why I am starting to put ideas together now so I can share it with them for their builds next year. 8094 looks interesting! I've been looking at 8062 to see the lift/grabber in that too. We've made a linear actuator lifter and a simple claw grabber (using a worm gear between the two jaws), but it is very large and ungainly. It works but I'd like a more compact robot. I also need to leave room for ultrasonic sensors to locate the can it has to lift and then it has to find a platform and place the can down on the platform without dropping it.
-
Yes... I've got his book and was thinking about this... The robot that came 2nd at the Australian Robocup National Finals used this design. I've been trying to incorporate a grabber into a forklift design. I can do it with two motors. I was just wondering if it could be done with just one?
-
Is it possible to construct a lifter arm with a grabber on the end that uses only one motor to lift it and operate the grabber at the same time? I've been messing with differentials in such setups but have been unable to get one to work.
-
[MOC] Skid Steer Loader
TasV replied to imurvai's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Showed this to my Son and he applied it to making a line-follow robot: Ignore the brick on the end.. it's just there as a counter weight at the moment. I love it because it gives a wide, large platform on the back to which the bricks (x2) and a lift mechanism can be mounted really easily. The weight will end up over the back wheels once the bricks are on. -
Is there a way to get the M-motor off the end of the crane and down in the body more? It adds a lot of weight out towards the end of the crane. I'm interested in how to do this for a robot version of this we are playing with (only smaller).
-
[MOC] Skid Steer Loader
TasV replied to imurvai's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Yep... been wanting to make one ever since I saw this: http://www.genuinemodels.com/skidsteer.htm -
[MOC] Skid Steer Loader
TasV replied to imurvai's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
My Kubota tractor has a similar scoop mechanism (but with hydraulics)... I love this model. I think it has an excellent application in line follow robots when combined with a PID. I can't wait to see the LDD. I would buy this as a Technics kit for sure. Awesome job! -
I have the Rock Crushers (linked somewhere in this thread)... and they are really soft. In fact.. they proved to be unsuitable for our robots (despite having excellent grip) because their compound is marking and because the robot turning system is based on a skid-steer system it quickly left black lines all over the robot tracks and confused the robot because it didn't know which line to follow!!! We switched back to standard Lego tires because they don't mark when they skid and meant I didn't have to clean the tracks with Turpentine after every training session.