TasV
-
Posts
152 -
Joined
-
Last visited
Content Type
Profiles
Forums
Gallery
Everything posted by TasV
-
Bent Technic Parts
TasV replied to CisFran's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
I needed a dif. last week and found one in my Son's mountains of Lego (that we are slowly sorting out... such a huge job), and when I found it I noticed he had bent it. I boiled the kettle and then dunked the dif. in the boiling water for just a few minutes and whilst still hot pulled it out and bent it back into shape and held it in place until the piece was cool again. Worked very well. So I would try a heat treatment... if someone HAS been chewing on it, like someone above mentioned, it might help to sterilise it too My brother-in=law used to mould perspex sheets in the oven by heating then slowly and gently and allowing them to slump over a mould. You could heat these pieces slowly to about 100°C and apply some pressure to bend them back into place and allow them to cool while still clamped. -
Effe's MOC Corner
TasV replied to efferman's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Thanks for the LDD! It's just what I've been looking for. Now here's a challenge... how might this be modified for use with two NXT Motor (steering and drive motors) instead of a motor that can be placed in line like the XL without mounting it vertically? -
I think this is pretty impressive! Not sure what your rules or budget are but if you get a chance check out these (image is clickable): Schools often have Vernier sensors for data loggers and these adapters will allow you to incorporate any of these into your Mindstorms robots. They also make a sensor block if you are using NXT-G here: http://www.vernier.com/engineering/lego-nxt/vernier-sensor-block/ . This will allow you to use the Vernier sensors (like conductivity sensors): http://www.vernier.com/products/sensors/ How did you differentiate between the plastic and the glass? I'm not fully understanding what you mean by a proximity sensor... unless it is just like the Mindstorms Ultrasonic sensor???
-
@ OzBen... that's exactly what I thought of when I saw it the first time too! Haven't seen one in years. I would see them quite a bit when I lived in Moree back in the mid 90's as they were popular hunting vehicles. Just the other day I was looking at my own (VZ) Holden Crewman Ute and wondering how I could mod it to be like an Overlander! I decided the build of the current utes were a far cry from the sturdiness of the old HZ and that this was a stupid idea LOL! Was also thinking of how I could MOC the good old Aussie 1 Tonner Ute!!! Imagine a regional release of the Lego One Tonner at the Great Aussie Ute Muster!!! Awesome! This is the first time I've noticed the winch on the front of this model. Does it work or is it just for decoration? I think a functional winch is a cool idea for those who want to take their crawlers outside so there really isn't any obstacle they can't get up and over! How nice would it be to see this set with a silver chromed bullbar/winch!!! If it's going to be a limited edition as I heard mentioned it would be possible for TLC to make a short run of these chromed parted for it surely.
-
Hi Dluders... I'm familiar with deflating the tires in 4WDs when driving on surfaces such as sand. I only did it once when I had my Jeep Cherokee (sport). I hadn't put these two things together but yes... you are right... there will be more contact so even better grip! The reason behind the omniwheel is that a basic line-following NXT-G program will cause the robot to scan left and right by powering the left and right front wheel alternately. This means the back end needs to 'wiggle' freely. Many designs use a jockey wheel but we have found that a swivelling jockey wheel can sometimes 'jack-knife' and fight the turning of the robot enough to send the robot off course while it tries to correct itself. The Omniwheel eliminates this problem. Part of the course includes an incline and the normal balloon wheels that come with the NXT - Education kit don't have enough grip to climb the incline and we can't gear it down too much because the NXT motors already have a fairly low rotation and high torque and we are timed around the course. So these are an experiment to try and increase the grip in the front end whilst minimising the friction in the back end with the omniwheel that will hopefully allow us to move around the course faster, climb over the speed-bumps easily without losing the line, climb the incline and the see-saw more easily... and look sexy while we are doing it with our pimped-out ride ;) We are also developing a better program that follows the line more smoothly, without the constant L-R scanning and we have just built a robot with a simple steering rack/dif. combo that turns it from the back as well (like forklift steering) so we can hopefully get smoother and tighter turns but this is proving to be a real challenge for my 12 year old Son to program. This is what we compete in:
-
I received my Rock Crusher Micro Crawler Tires (Part Number Z-T0027) and am loving them. They feel almost sticky to touch. I like that their OD is 48mm... exactly the same as my Rotacaster Omniwheel. I got these for my Son for his NXT robot to add grip. Only trouble is that even with the foam in them the mass of the NXT+NXT motors/sensors is enough to cause a bit of deflation in them. Excellent grip though and great price.
-
Mini Motors with NXT
TasV replied to TasV's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
This is what I had intended to do and still might. The PF M motor is slim and fairly light but I went looking for even smaller motors last night to see if I could go even smaller. It doesn't need to work for very long or very often as the robot has to make its way through a course first and then locate a soda can at the end of the course, lift it approx. 10cm off the ground, and then locate a red block and place the can onto the red block after travelling a max. of 60cm to the block. The speed of the 2986 is going to be the problem (its max. speed is only something like 35-36 rpm and running that worm gear the grabber will go even slower) so I might end up going with the M motor or trying to find one of those 9V 4x4x3 1/3 mini-motors. On the plus side the 2986 will make the movement smooth and deliberate though I'll be relying heavily on the light touch and grip created by the rubber tires in the jaws. The slipping pulley is a concern as I can't gear it down any more but I don't think the worm gear will create much fiction or load. The thing I like about the 2986, and the other older motors, is that the cable is thinner and more pliable compared with the M motor's cable which is wider, thicker, and less pliable and so it is less likely to affect the motion of the linear actuator or even the lift mechanism. When attaching some of the sensors with the standard NXT cables it has been a major pain at times because the cables are so rigid that they will literally push the sensors at connection points causing them to tilt. This occurs when I try to put too sharp a bend in the cable by forcing it into too tight a spot causing the cable to flex in the opposite direction and tilting the sensor despite being connected with up to three pins on various configurations of liftarms. I use the thinner cables with LED lights on the robot (to make our own light source to overcome the variation we encounter in ambient light in competition venues) and these have proven very nice to work with and easy to stash out of the way without affecting any other part of the robot. I also got this reply from Phillipe Hurbain: I think I will overcome this through the program by setting the duration of the motor's activity so it doesn't ever become mechanically block. -
Mini Motors with NXT
TasV replied to TasV's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Ok... just bought one of these little micro-motors to trial... also found a really neat looking gear box (45360) as well that I just know will come in handy. Why is it that whenever I go into BrickLink I always end up spending way more than I had planned -
Mini Motors with NXT
TasV replied to TasV's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Thanks for the advice! The grabber shown above was just our LDD of it. When we made it we left the bevelled gears out, so that linkage will not be included. It will be directly driven straight to the worm gear from the motor as we don't need to change the direction of the rotation anymore. Does the light grey pulley ever slip when under load? -
Mini Motors with NXT
TasV replied to TasV's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
The worm gear does substantially reduce the effort required to open and close these grabbers... and it looks like it can be driven backwards and forwards. The link Dluders provided mentions these micro-motors tend to jam up. Have people found this to be an issue? I could rig up some technic connectors to prevent the pulley from coming off too. Some accounts I've read also mention stacking these micro-motors. I guess that would be to distribute the load between them so they aren't working so hard??? -
Mini Motors with NXT
TasV replied to TasV's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Thanks Dluders! Do you think the 2986 would have enough power to open and close this grabber, grab a 16g soda can and hold it (the grips on the jaws should do that just by friction) while it was being lifted by a LA? I am liking the look of this little motor because, whilst it is really slow, it is has very little size and weight. -
Mini Motors with NXT
TasV replied to TasV's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Thanks OleBM, I was also thinking it should be possible. My understanding of the power ports in the NXT brick is that they just supply a variable power supply to run the motors at different speeds and directions (though they also convey sensed data in the form of rotations (RPM and degrees)), and therefore should be able to run these other 9V motors with the appropriate converter cable. I thought I'd try and get some learned feedback before going out and buying any. -
I need a small 9V motor for an NXT Mindstorms robot my Son and I are working on (no rush... we have 12 months to get it right), and I need a small 9V motor that doesn't take up much room or have much weight. I have an M PF motor (58120c01) which is quite small and we can use this without any trouble because I know I can get it to work with NXT using a converter cable but I was looking at the smaller 9V 4 x 4 x 3 1/3 motor (47154c01) and the 9V Mini-Motor (43362c01)... and even the tiny 2986... and wondering if these could also be powered and controlled by the NXT brick? They have a different attachment to the newer PF motors but I don't know if this will make a difference? Any ideas? It needs to be possible back-drive them too. (interesting link: http://www.philohome.com/motors/motorcomp.htm seems to suggest NXT can power them but am still not sure)
-
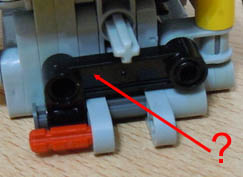
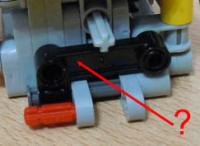
Sorry to go a little OT.. but what is this part? It looks like something I could use. Is it 11455?
-
chromed parts
TasV replied to mornevanstaden's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
How do chromed parts wear? Do they do inside the connector holes and if so does that affect the fit of pins and other connectors? -
Thought people might like to see this: http://issuu.com/hispabrickmagazine . It's free and there are 14 other editions to read too. I just found Issuu last night and think it is pretty awesome. Type in Lego nxt or lego technic in the search field!
-
micro: http://www.ebay.com.... tires&_sacat=0 other: http://www.ebay.com.au/sch/i.html?_odkw=losi+micro+tires&_osacat=0&_from=R40&_trksid=p2045573.m570.l1313&_nkw=losi+tires&_sacat=0
-
If you have access to a Mindstorms NXT 2.0 brick with the rechargeable battery you can run these plugged in and use a Mindstorms motor or a PF motor with converter cable to run it. Then you can even program that as your timer.
-
Can pneumatics be used with NXT 2.0?
-
Ramacco's grabber is a simpler, much better, design and is lighter on the lift-mechanism. We've made a similar one now and are trying to work out how to attach it to a lifter of some kind: (click for full size. Full LDD here). I'm kind of stuck on how to attach the motor to the grabber and have resorted to buying a small power functions motor to install directly onto the top of the grabber so that the flexible cable can go up and down with the grabber. Is there a better way to power the grabber so I don't have to install it directly onto the top of the grabber? We used 6M cross-axles at the front so we can add ultrasonic sensors and/or touch sensors to the grabber.
-
sorry... I typed it wrong... it should have been simon.voorwinde@education.tas.gov.au ...
-
I really appreciate your assistance, thank you! I was looking at this LA last night actually! Nice and simple!
-
Ahhh.. that's right... the motors have built in rotation/angle sensors don't they... I'll get the PM sent off tonight. OleBM... I'm either making my own linear actuator (simple one with worm gears) or using a 13M rack to make a rack and pinnion style lifter. Whatever it ends up being needs to be simple for the kids to make so they can take the idea and run with it to make their own vesions of it. I'm just trying to put together a mock-up of a few different mechanisms they can then use when they create their own designs. I've looked at the Firgelli ones before and love the look of them. There are a few youtube videos of grabbers using these as well... they have an extra long reach. My budget won't stretch far enough to buy these for each group of students, unfortunately. For some reason (maybe cos I'm a newb here) I can't access other member's profiles to send PM's or see email addresses. My work email address is simon.voorwinde@education.tas.edu.au if I can ask the plans be sent there. Cheers, Simon
-
Thanks 'OleBM'... I've been trying to work out how to fit a linear actuator (a D.I.Y. version) to lift it high enough without disengaging the gears on the jaws. Ramacco, this looks excellent. Do you mind if I look at your instructions and share them with my students (I run the lego robotics class at the school I work at), when you post them online to give the students some extra inspiration? Those Mindsensors look good ... good prices too when compared with Lego sensors. The only 3rd party sensors I've played with are HiTechnic ones. It looks like these can be programmed using NXT-G too... great for us beginners who are just learning about RobotC. I should also mention that I have height and width parametres to work within. The robot can't be more than 270mm high and wide.
-
Thanks to the posts on this forum I have modified a simple grabber that I want to put onto an NXT line follower robot to grab a soda can (I still need to play with the design to put rubber grips on the inside of the jaws and try to fit a touch sensor in so it knows when it has shut around it). Once it grabs the soda can it needs to lift it approx. 10cm off the ground, locate a red block, move to the red block and sit the soda can down onto the red block. I'm wondering if this grabber can be incorporated into a forklift-like mechanism so it can be lifted vertically without tilting the soda can backwards. I was thinking it would make setting the soda can down on top of the block smoother and more precise than something that lifted it up and down in an arc. If anyone has any good ideas I'd love to hear them. Thanks in Advance, Simon