
TasV
-
Posts
152 -
Joined
-
Last visited
Content Type
Profiles
Forums
Gallery
Everything posted by TasV
-
Shapeways Custom Lego Parts
TasV replied to TasV's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
I'm uploading as we speak... will be interesting to see how much it ends up costing too. EDIT: WOW! $27.17 with shipping to Australia for two 1x4 liftarms in strong & flexible polished material (white)! We get so screwed here in Australia with postage from the O/S. It's crazy. -
Shapeways Custom Lego Parts
TasV replied to TasV's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
I forgot to mention the file is in SketchUp format (SU 8... haven't got 2013 on my computer yet) and to get it to Shapeways it needs to be exported as an STL. -
Shapeways Custom Lego Parts
TasV replied to TasV's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
I've redone the liftarm file and think I will send it to them to see if they can do it and see if it's any good. It's much higher quality and I've drawn it so that each hole, and the rounded ends, is a modular unit so I can just stack them end to end to make them as long or as short as I want. The model was made in Google SketchUp. If anyone would like the file just PM me. The drawing was based on this diagram: Ref: http://bricks.stackexchange.com/questions/2066/what-are-the-size-of-lego-technic-parts -
Mindstorms EV3 R2-D2 Video
TasV replied to bartneck's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Yes... not sure what happened there??? I'm trying to convert it into RobotC as well and I'm kinda interested in going back and relearning calculus so I understand it a bit better... when I have the time... bring on the Christmas Holidays! -
Mindstorms EV3 R2-D2 Video
TasV replied to bartneck's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
This is pretty nice! I know you are using the new steering block, but if at some time you'd like to develop a PID controller check this out: http://www.inpharmix.com/jps/PID_Controller_For_Leg -
Shapeways Custom Lego Parts
TasV replied to TasV's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Based on the part, the materials, or the drawing? I'm not overly happy with the drawing and am redoing it at higher resolution and better quality when I get some spare time. The dimensions aren't very accurate in this drawing. -
Shapeways Custom Lego Parts
TasV replied to TasV's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
I'm thinking I might test it out by printing this one I made: -
Shapeways Custom Lego Parts
TasV replied to TasV's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Your parts were printed in this material weren't they? http://www.shapeways.com/materials/strong-flexible ABS plastic would be handy. -
Shapeways Custom Lego Parts
TasV replied to TasV's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
I wonder what this material would be like: http://www.shapeways.com/materials/detail -
Shapeways Custom Lego Parts
TasV replied to TasV's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
That's very cool! -
Shapeways Custom Lego Parts
TasV replied to TasV's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Did you use Shapeways? -
Shapeways Custom Lego Parts
TasV replied to TasV's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Yep... you can choose all kinds of different materials (like ceramic even???) and the different materials allow different resolutions/detail. -
Shapeways Custom Lego Parts
TasV replied to TasV's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
These aren't my designs... these are designs I have just discovered on Shapeways that I found interesting... I haven't tried any yet. I'm thinking of it though. Anyone can do it quickly and easily. -
Shapeways Custom Lego Parts
TasV replied to TasV's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
I was thinking I might try a few designs of my own and see what the quality is like. -
Some interesting ideas (though the resolution of some of the parts doesn't seem very high): Technic GoPro attachment: http://www.shapeways.com/model/1302185/gopro-to-lego-beam-camera-mount.html?li=search-results&materialId=6 Trasmission Control Connector: http://www.shapeways.com/model/1113370/lego-transmission-gear-connector.html?li=search-results&materialId=6 Double Connector: http://www.shapeways.com/model/830091/lego-double-connector.html?li=search-results&materialId=6 Planetary gear housing plus hub: http://www.shapeways.com/model/890592/lego-compatible-40-teeth-ring-gear.html and http://www.shapeways.com/model/892180/lego-compatible-secondary-planet-gear-carrier.html?li=search-results&materialId=6 1x1 stud: http://www.shapeways.com/model/929098/lego-stud.html?li=search-results&materialId=6 gearbox cap: http://www.shapeways.com/model/929098/lego-stud.html?li=search-results&materialId=6 Bitbeam (???): http://www.shapeways.com/model/1301054/the-original-bitbeam.html?li=search-results&materialId=6 x-hole flat: http://www.shapeways.com/model/1304627/xhole-test-scad.html?li=search-results&materialId=6 so many more interesting things. Just search for Lego.
-
So, it couldn't be done to drive forward, be able to turn left or right as required, as well as reverse in a straight line for short distances?
-
First... the something awesome: http://idintern.wordpress.com/2013/04/06/lego-holonomic-wheel/ . Just thought this was really interesting. Steering question: I was speaking to a colleague of mine who is now the I.T. guy at work and the conversation got around to Lego robots because he had heard that the kids in my robotics class recently competed in the state Robocup finals and took out 1st, 3rd (my Son :) ), 4th, and 5th place in the event out of 80 teams making us the current year's state champions. He was talking about how he competed in Robocup when he was a kid. Something he said has been bugging me for a while now and I haven't been able to work out how it might be done... if it can be done it would allow us to make much smaller and lighter robots. He said he managed to install steering into his robot that used only one motor (the NXT motor) and no steering rack (no pivot system either). Can this even be done?
-
I use the 9V micro motor (shown above) with NXT because it is very small, can be tucked away easily, can be end mounted, and the soft flexible cabling doesn't impede movement. I would love a micro-motor that has soft, pliable, retractable cabling to assist with tidying the cables even more... nothing spoils the swag of a good robot more than a bird's nest of cables. All that is needed is two adapter cables. It works well on 9V PF battery packs too and so long as you don't over-do it and expect it to do something it can't, slip isn't a problem. I think the idea of a technic micro-motor, with pin attachments instead of being studded, is excellent. Sometimes you just want to move something small, or move something in a small robot that changes position like a grabber on a forklift mechanism on a small robot. RoboCup rules state that I can't make a robot bigger than 18cm high and wide for Senior Rescue and 27cm high and wide in Premier Rescue and the longer a robot is the more it swings and the more chance it has of leaving the edge of the track. How would you open and close the grabber at either the top or the bottom of the fork's lift position if the motor wasn't mounted directly on the grabber so it lifted with the grabber? Putting the motor on the end is the only real option. For NXT, where size often must be kept to a minimum and sensors compete for mounting positions, a slow, geared, technic micro motor without encoders, would be very helpful.
-
Real or Third-Party part?
TasV replied to TasV's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
In the EV3 parts inventory it lists the ball bearing as bb607. It's an expensive little ball too! See: here. Does the ball spin freely in the 92911 receptacle? -
I got the kids at school to test the grip (traction) of a range of Lego tires and the Losi Rock Crusher Micros and TBH there wasn't a lot of difference in grip between them. Have you seen this: http://philohome.com/traction/traction.htm ?
-
Real or Third-Party part?
TasV replied to TasV's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
I have two on their way to try out... I'm picturing them attached vertically to some suspension so they can swing easily but also pop up over small, low, obstacles (like 5mm high speed humps in robot trial tracks). -
I found someone selling these on Ebay: ... and thought they looked interesting. Are they real Lego parts or third-party parts? If real, what's the part number?
-
Non-driven dif
TasV replied to TasV's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
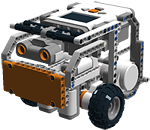
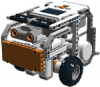
His robot looks like this at the moment, sans differential: The front tires are Losi Rock Crusher Micro Crawlers and the rear ones the Rotacaster Ominwheels. Pretty much done now. I just want him to adjust the position of the LED lights next to the light sensors and drop the light sensors half a brick. -
Non-driven dif
TasV replied to TasV's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Rear wheel drive and 4-wheel steering is something I'd like to try with the robot... but at the moment the programming of this is beyond me. Combining steering with a line follow program to make an autonomous steering robot would be very sweet. How this might happen is starting to take shape in my head... but it's still too hard for me at the moment. The design and engineering side is not so hard... it's the programming that has me conceptually stumped. -
Non-driven dif
TasV replied to TasV's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Out of the rear differential or the omniwheels??? The breaking in his robot was achieved by programming motor breaking into it. I've got him to remove the diff. and brace it up with a 5x7 frame... we have one last engineering challenge to solve (proving difficult) and he is done and ready to compete!