TimberBrick
-
Posts
22 -
Joined
-
Last visited
Content Type
Profiles
Forums
Gallery
Everything posted by TimberBrick
-
[MOC] 6 Axes Robotic Arm
TimberBrick replied to camellia's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
I especially appreciated the counterbalance ideas! -
Very impressive. I've often thought about how to make a track with the strength to support a heavy model. Could you share how you did it? Thinking about your Lion batteries, we build power hungry battle bots that we power with AA packs that have 5 Nimh and one LION. We upgrade the bournes resettable fuse to 2.5 amps. Recently we have gone to RC car 9.9v LiFe packs which is a revolution in power.
-
The Handful of Buggy 4x 5292
TimberBrick replied to AndyCW's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
How do you control the buggy motors? I find that with SBRICK they limit out (cause the H-bridge driver to derate) especially above 8 volts. -
I found a definitive answer from SBRICK employee Tamás Fábián of Vengit https://social.sbrick.com/forums/topic/5/max-current-rating/view/post_id/13984 "the absolute maximum value is 11.8 Volts. This comes from the datasheet of the integrated circuit we use for driving the outputs (DRV8833). The safe operating limit is 10.8 for the same IC. Having said that, we managed to overvolt SBricks up to 14 volts and never damaged a single one. However, do not take this as a recommendation. It's a bit like overclocking / overvolting CPUs and memory modules in a PC. Be aware that overvolting your SBrick beyond the absolute maximum voids your warranty. What you can do is: Play safe, and don't run the SBrick over 10.8V Accept some extra heating and reduced safety margin, and go near the absolute maximum limit of 11.8V Accept the chance of immediately and permanently damage or severely reduce the lifespan of your SBrick, and run it over the absolute maximum of 11.8V. Use a 3-cell Lithium Iron Phospate (LiFePo4) battery. With a maximum cell voltage of 3.65V it just barely goes over the recommended operating limit of 10.8V, and stays well below the absolute maximum." I'm going to go the LiFe route because I think it is less likely to risk a LiPo fire.
-
Before radio control hobby planes, they had control line planes that flew in a circle around the operator connected to a control line that operated the elevators only, allowing the operator to dive and climb. This arraignment may be good for testing until you solve the bluetooth distance limitation.
-
I'd like to operate my SBRICK plus with 3 Lion cells. This can be accomplished by putting three Lion rechargeables and three spacers in a AA pack. I'm worried about overvoltage damaging the SBRICK. The 3.7 volt nominal cells come off the charger at 4.2 volts for an initial max voltage of 12.6. Has anyone done this? Does it work, or does it let the smoke out?
-
With Captainowie's important hint and hours of trial and error, here's what I figured out. To apply more that one control to a port, in the profile designer, name the channel of each control with the exact same name, for example "Flipper". Then, in the SBRICK app, when you configure the ports, you will find a channel called "flipper" that is operated by multiple controls. Those controls may include sequences with the same channel name. If you assign gamepad controls, you can assign one gamepad control to each screen control you have set up. Gating the control was really difficult to figure out. You use a circuit. The input is the particular control. The Logic is "transform." I wanted my joystick X axis to only run the flipper forward when the control was 90% to the left. That is the negative direction. So the upper limit was 0, and the lower limit was -.9. Both closed boxes checked. I think "closed" means less than the upper limit, and greater than the lower limit. The circuit can be engaged or disengaged by pressing its button. It can start out engaged ("Autostart YES"), or disengaged.
-
The SBRICK profile designer documentation is pretty cryptic. Do the experts here at Eurobricks have some advice about using circuits and sequences to: 1. Gate a joystick control so that in one direction the motor only runs at full speed when the slider is moved all the way up (to 1.0), but leave the reverse control variable speed. Application: Flipper control for PKW's TC11 battle bot wheeled scorpion. The flipper fires with any forward motor motion, and often needs precise control when reloading. Gating the forward control will help limit misfiring. 2. Start a sequence from a button controlling a motor that is also controller by a joystick. Application: Automatically fire, and then reload the flipper.
-
We are having great luck controlling two SBRICKs at a time. Apparently a person can pair more than one gamepad ( I think up to four) with an iPhone. We only have one phone. I did post the question to the SBRICK forum, but it is not well attended.
-
We have been enjoying controlling our Lego Battle Bots with SBRICK. Team battles are really fun. I can control two bots with my iPhone using a MFI gamepad for one, and the iPhone for the other. Before I buy a second gamepad to control three bots, has anyone used multiple gamepads with the iPhone SBRICK app?
-
Hi Imanol, Thanks for your ideas. I build it and discovered some interesting things. When the catch loads the medium motor, it coils the motor gear train like a spring. When the motor turns off, the catch releases. I replaced the 24 t gear with a white clutch gear, and it worked. However, the load of the elastics was too much for the catch geometry, and it would slip. I worked out better catch geometry, and then discovered that I needed more torque that the clutch gear could provide. Really what I needed was a smaller clutch gear so that I could multiply torque on the output end. Ultimately, I made this gear by drilling out a 12 t gear until an axel shaft would slip with torque just under the stall torque of the medium motor. The current assembly allows me to use elastics about 3x stronger that I started with. There is surely more development to be done.
-
Thanks for engaging in my design problem. My initial effort was to actuate a catch with a medium motor. It was unsuccessful in the implementation shown below: The cross block slips too easily on the pin x 3 long axel connected to the medium motor. It was at that point that I thought to tap the wealth of experience on the Eurobrick forum. Here is a look across the front: There could be access to the pair of 16 t gears in the middle for a braking mechanism if the space around the 20 t bevel gear on the left is too limiting.
-
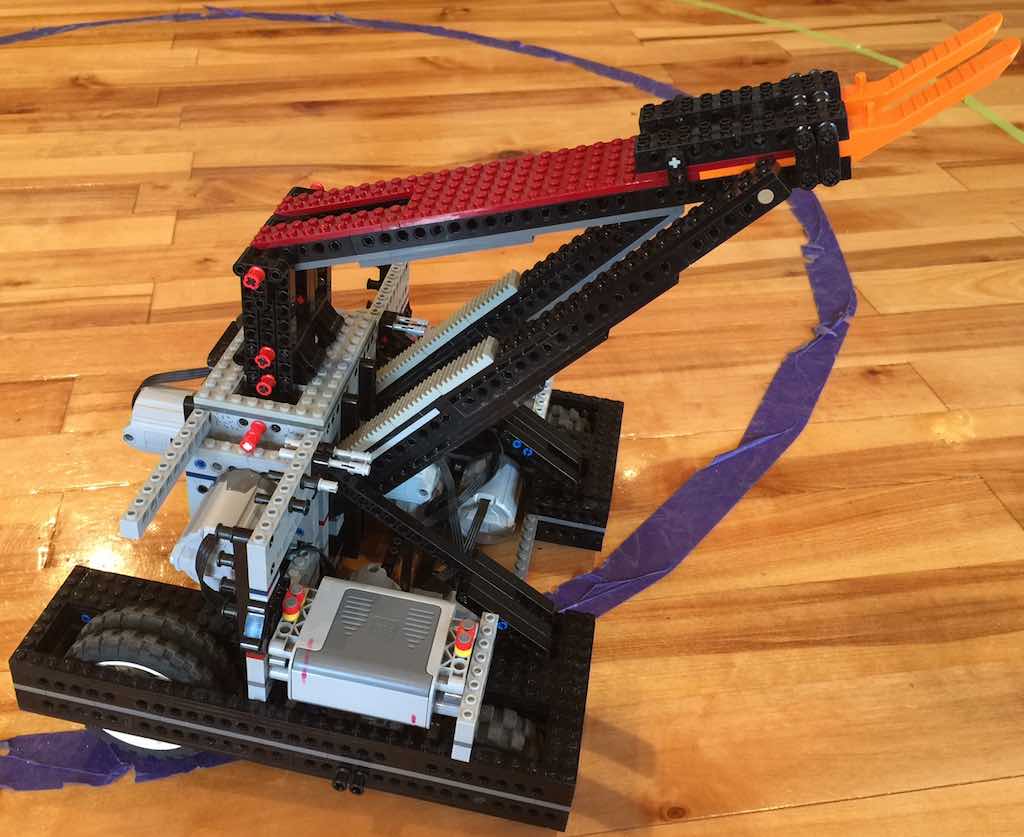
"El Toro" is a much-loved heavyweight battle bot. Here is a video showing "El Toro" in battle with Lancelot and Empire Builder: As you can see, "El Toro's" main weapon is the dual lifting forks. Speed and power of the forks is essential for effective battle. Recently, I've been upgrading their power, and have added elastics to the back side of the gear tracks. The elastics store power on the downward return cycle for added flipping power. However, they easily exceed the resistance of the two XL motors, and the forks drift up off the floor. I need some kind of braking mechanism that holds the forks in place when the XL motors stop moving. What ideas do the experts on Eurobricks have?
-
Pretty cool ideas. I built type 1 and found that part of the action stems from the internal medium motor gears tensioning like a spring. I.E. if you stall a lever arm affixed to the motor shaft, it will spring back when you stop the motor. Interesting. I had hoped to use this concept to switch a three speed transmission, so the motor would be in the stalled position for a long time. I found that the motor got warm when switching it back and forth for several minutes, and eventually it current limited out.
-
[TC11] Wheeled Scorpion
TimberBrick replied to PKW's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Yes, those are the current opponents. Wheeled Scorpion is most effective against El Toro, which it can flip up on its back. The Scorpion's wedge shape and caged wheels are particularly effective against the large bots with big wheels because they tend to drive over Scorpion, which is entertaining. SRMECH hasn't come into play. I think this is because when flipping Scorpion, early in the flip all the tires loose contact with the floor as it rolls against the low battery or wheel cages, and then Scorpion is rapidly pushed out. Most flips are completed after Scorpion is pushed out of the circle. I made an upgrade to the flipper: This upgrade features more torque on the winch and strengthened winch support for more flipping power. It adds a second elastic actuator on the scoop for added height. Note: the red parts attached in unexpected places are to be placed nearby. LDD would not let me place them where they go due to unsolvable alignment issues. Often, you can find the bilateral part on the other side correctly placed. Here is a link to the LDD instructions: Dual Action Scorpion Flipper -
[TC11] Wheeled Scorpion
TimberBrick replied to PKW's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Yes, those are the current opponents. Wheeled Scorpion is most effective against El Toro, which it can flip up on its back. The Scorpion's wedge shape and caged wheels are particularly effective against the large bots with big wheels because they tend to drive over Scorpion, which is entertaining. SRMECH hasn't come into play. I think this is because when flipping Scorpion, early in the flip all the tires loose contact with the floor as it rolls against the low battery or wheel cages, and then Scorpion is rapidly pushed out. Most flips are completed after Scorpion is pushed out of the circle. -
[TC11] Wheeled Scorpion
TimberBrick replied to PKW's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
The Wheeled Scorpion is really fun to fight. Our other bots are much larger, weighing 2 to 2.5 kg, so it is a David vs Goliath scenario. We often have three way battles, so little Wheeled Scorpion is sometimes the deciding factor. It's cool to have two separate weapons. The wedgelets lets are surprisingly effective. We've been working on the design to increase flipping power to become a bigger threat to those titans. Currently we use a double line pull and 6 rubber bands. We've also changed the battery box holder so it's easy to remove and service. The other bots are also fast, so it is challenging to time the flip. I'm currently thinking about a physical trigger release right on the flipper, so that it fires when it bumps against another car. Thanks for the fun that your excellent design and building plans are providing. Cool arena. I look forward to seeing it in action. -
[TC11] Wheeled Scorpion
TimberBrick replied to PKW's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
My kids are enjoying building your "Wheeled Scorpion" for a Lego Sumo/ Battle Bot contest of our own. I'm excited to see how the flipper works, and how the design fights. Have there been any refinements since the TC11 entry? Earlier in your thread you mentioned building your own lego robot wars arena. Did you do it? -
PF Maximum Voltage
TimberBrick replied to rkkm's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Mixing batteries is only a problem for charging a whole pack. In this case the batteries are charged individually in their respective charger types. The capacities of the LION and NIMH batteries are different, so for discharge the lower LION capacity limits the discharge duration. My application is battle bot pushing contests typically with four XL motors. The extra voltage limits the likelihood of stalled motors and makes for great action! -
Initial Design: Flipper armed battle bots are winning designs. I stated by designing a variable geometry flipper that maximized the available dimensions. I wanted to insert a photo here, but the forum is limiting my size to 20kb???? Battle Trials: After getting the initial design built, we battled Lancelot against other winning designs I had built. This exposed many weaknesses which I then addressed. One primary weakness was the compression strut distributing the load of the flipper arm to the front wheels. When it was loaded in tension, the pins would pop out. I discovered that I could press a flick missile pin inside the regular pin, locking it in place from withdrawal. The battle format we use is a Lego Sumo Contest: push your opponents outside a circle by any means possible. it's simple and really fun. We use a four foot circle for 1v1, and a six foot circle for 3-way and team battles. Invite: Bring your Battle Bot to next year's Bricks Cascade convention in Portland Oregon, February 2018. Final Build: Lancelot Category: A SBrick Signature Move: Power Tilt Drive: 4 XL Motors Control: Skid Steer Weapon: Variable Geometry Flipper powered by 4 XL Motors Flipper armed robots are consistent winners. See how much fun it is to Power Tilt the competition with Lancelot in the video below. This heavy 2.55 kg bot can flip far more than its own weight. The forks have substantial down pressure - ramming a zero ground clearance bot will pierce the forks underneath it. Fast flipping action and speedy maneuverability enable a skilled driver to Power Tilt rotary weapon bots before their weapons come up to speed. The system block construction is rigid and indestructible.
-
PF Maximum Voltage
TimberBrick replied to rkkm's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
I use regular AA Lego packs to operate both SBrick and Lego IR receivers at 10.8 volts. In at least 40 hours of operation at high amperage, none have died. I use 5 NIMH batteries with one LION. The power increase is substantial. Other combinations with spacers is possible for weight reduction. -
6. Lancelot Category: A SBrick Signature Move: Power Tilt Drive: 4 XL Motors Control: Skid Steer Weapon: Variable Geometry Flipper powered by 4 XL Motors Flipper armed robots are consistent winners. Lancelot is battle tested, and ready to Power Tilt any opponent! This heavy 2.55 kg bot can flip far more than its own weight. The forks have substantial down pressure - ramming a bot with zero ground clearance bot pierce the forks underneath it. Fast flipping action and speedy maneuverability enable a skilled driver to Power Tilt bots with rotary weapons before their discs come up to speed. The system block construction is rigid and indestructible. Invite: Bring your Battle Bot to next year's Bricks Cascade convention in Portland Oregon, February 2018. See the Lancelot thread for exciting battle testing.