FvdB
-
Posts
8 -
Joined
-
Last visited
Content Type
Profiles
Forums
Gallery
Everything posted by FvdB
-
EV3 software on PC very slow
FvdB replied to IceAxe's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
I can at least tell you that that doesn't sound normal. It lagged on my i3, but certainly not on my i5 and i7. -
[TC9] WIP 4x4 Racer
FvdB replied to JJ2's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
You probably took it apart to make the B-model, but I keep wondering if those wheels aren't too big. Have you tried using smaller wheels? -
[TC9][WIP] roadster/hotrod?
FvdB replied to muffinbrick's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
I like it a lot! The foldable roof is very nice. I do feel the wheel arches look a bit crude. You could possibly make the bonnet narrower by removing the red beams, and use a flexible axle to make a cruved arch. You'd then have a problem connecting the bonnet though. It's less of a problem to me at the back. -
[EV3] Programming
FvdB replied to schor's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
The manual that is installed with the EV3 software is pretty good, but it's also quite well-hidden. Did you find that yet? The programming itself resembles Scratch. It's not difficult to get the hang of, but programs tend to get unmanageble when they get too big. If you start making difficult things, you could try LeJos. It's java-based and free. I have several EV3 books, and they thaught me that I tend to create programs that are way too complex for what I want. Reducing the robot tasks to manageble pieces in a skill in itself. -
[MOC/WIP] Small-scale RC car
FvdB replied to FvdB's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
All of my battery boxes were empty, but I did test the PF with a battery box that was used in the Arocs. If I remeber correctly, the steer is turned a tiny bit by the servo. Turning the servo with the steering wheel is not possible. It is very hard to manually turn the servo from any other axle than the one going through the servo anyway, because of the way the steering works. The servo axle is 2 studs above the plane of steering, and they are connected by a (+O+) beam that pushes the steering rods left and right. It works, but it requires some torque. The servo is a pretty powerful motor and it can do it. The motion is a bit jerky, especially as it returns to the center. I have two types of battery boxes, none of them rechargeble. I really want to be able to hide the big one, but if I can't do it, I'll use the smaller one instead. The larger battery box feels more official. The battery box should probably go above the rear axle, but depending on the proportions in the bodywork, it's also possible that I may hide it behind the rear axle. -
[MOC/WIP] Small-scale RC car
FvdB replied to FvdB's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Which u-joint do you mean? Is there a problem in the design somewhere? O wait, the universal joint? As stated in the original post, they actually hardly turn. The play in the universal joint is larger than the possible turn radius. If that werent the case, it could turn though... maybe i should replace it with some gears. -
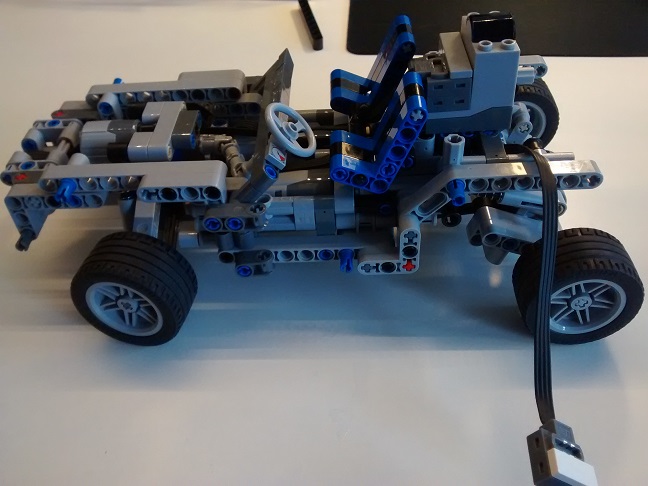
Hi all, This is my first post here, I'm not sure if the way I shared my pics works well. I've built a small-scale RC car, based on the 43.2x22ZR tires. My goal was to create a car at that scale, and still have full RC and suspension. The minimum width is determined by the differential and the steering pieces I used. I wanted the back wheels to connect to the rear axle through that double bush, so pulling at the wheels wouldn't mess up the gears in the differential. I have small kids, so the car needs to be sturdy. The result is the work attached. More pics can be found in this album: http://imgur.com/a/dw8jx. The springs I used are a little too soft. Since the car is not finished, this is not yet a big problem for the live axle, but the front already doesn't bounce up all the way because of the weight and position of the servo. I think I'm going to have to replace the grey springs with yellow ones. The steering wheel turns with the servo, but because I used the Arocs-mechanism for steering (no rack), the servo only has to turn a little bit. And this little bit is almost completely lost in the play of the two universal joints. I'm usually quite bad at building bodywork. I think this car should be a mustang-type, because of the current shape of the front, and because I based the rear axle on a Mustang. I've left plenty of opportunities to connect the bodywork, and I plan on making it easily removable. I've yet to think about which of my battery boxes I will use, so that will have some impact on the bodywork as well. Any remarks are appreciated. Filip