

piece
-
Posts
4 -
Joined
-
Last visited
Content Type
Profiles
Forums
Gallery
Everything posted by piece
-
Thank you @Zerobricks for your basis. I built it, but when playing, the wheels got stuck very often if a wheel encountered an obstacle. It just does not drive smooth without a third differential. So I tried to insert a center differential. Tried a lot, but could not fit it in this space. Since I wanted to make it somehow possible, I removed the teeth on my lathe. Maybe Lego will come up with a new part in the future. It is not pure Lego any more, but it is fun to play with. I have also an stud.io file with instruction steps, but it seems I cannot upload it here. Where could I upload it?
-
No, I had to remove the 48496. There was not enough room for that. Driving with the small gears should be not much of a problem. But when I blocked a wheel for a fraction of a second, it immediately burst into small pieces. The double bevel gears do not break so fast when the wheel gets blocked. After all i use a 11.1V battery which gets down to about 9.5v after the circuit stuff. It reacts a lot faster then any Lego or buwizz remote.
-
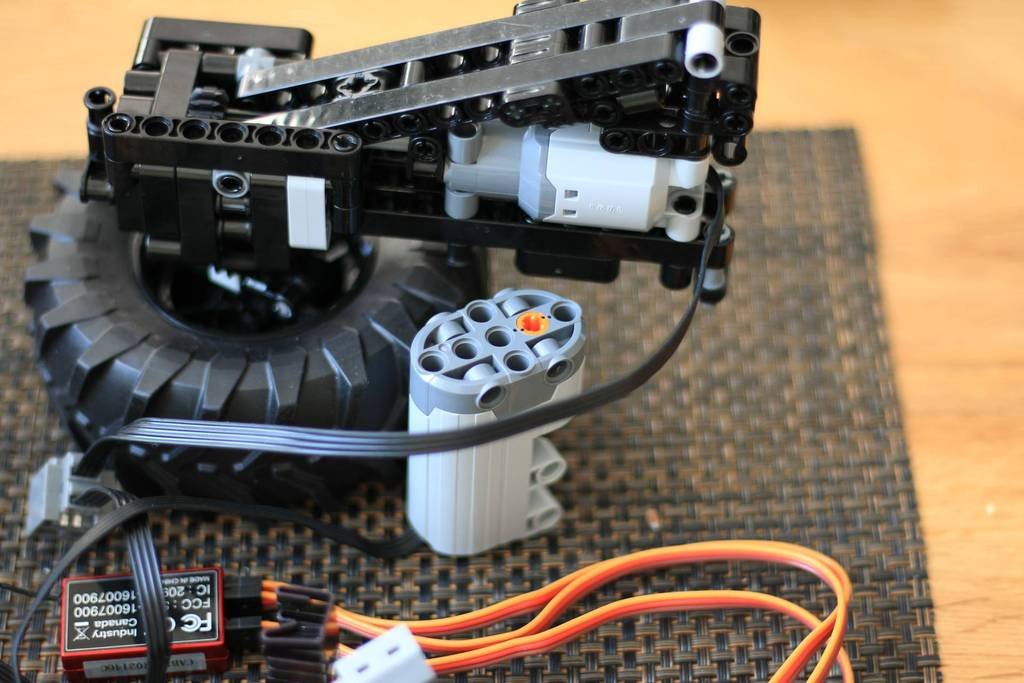
Yes, I used your latest lxf as my basis and imported that into stud.io. Then I made some changes to fit my needs. For example attached is an image how i reinforced the swing arms and changed the gears. I'll iterate on this to get it somewhat cleaner. But for the moment this seems stable enough. The gears in your version broke within the first 10 seconds in my setup. I use a proper RC remote and built a little circuit to control the motors smoothly. You can also see the center position of my servo. Maybe I should go to the lego store and demand a replacement. I bought it brand new recently. I'm looking forward to find out how you put the swing arms together. I honestly have no idea how you've managed that. If you look closely at the image, you'll see that I have to put some pins through the lift arm into the motor from the outside. As a result, I have to push the wheels 1 stud further out. That's not optimal.
-
@Didumos69 Thank you very much for your hard work. Currently I'm building the chassis and I gotta say, it was pretty hard to figure out the order in which to put it all together. While building it, I'm also creating the instructions in stud.io. Now that I've put together the front Axle part, I have some issues. First of all my servo's center position is not flat center. Don't know yet if this will be a problem later. But my bigger problem is that the steering does not allow the servo to use it's full range. Is that intended? Currently I have to restrict my Remote control to 80% range to left and right. I'm missing the last 2 steps of the servo. I don't think so, but maybe I build something wrong. And I cannot find a way to build the rear swingarms without stressing any parts.