astyanax Posted May 4, 2020 Posted May 4, 2020 Say we're building a racing car that's going to be fast and do lots of cornering on flat surfaces. And say we also don't want any problems in the drivetrain with gears skipping or grinding. I had this brain fart of replacing the differential by a linear clutch, like so: Is there anything obviously stupid or wrong with such a gear-free solution? (I suspect yes, because I haven't seen anyone else use this construction, but I don't really see the problem, yet...) Quote
Zerobricks Posted May 4, 2020 Posted May 4, 2020 It's a good solution if you want your car to keep turning and spinning out left. Quote
astyanax Posted May 4, 2020 Author Posted May 4, 2020 Just now, Zerobricks said: It's a good solution if you want your car to keep turning and spinning out left. I guess I was counting on both wheels to have super traction with the ground... Quote
Zerobricks Posted May 4, 2020 Posted May 4, 2020 Just now, astyanax said: I guess I was counting on both wheels to have super traction with the ground... They can infinite fraction and your car will still keep spinning left...Cause the left wheel won't get any power due to the clutches slipping. Quote
astyanax Posted May 4, 2020 Author Posted May 4, 2020 Obviously, MOCing is the mechanics 101 class I never attended... Quote
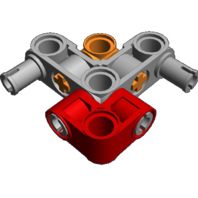
sirslayer Posted May 4, 2020 Posted May 4, 2020 (edited) Using as a center differential was my outcome and it works very well!! Check out my PSK on my mini Porsche 959!!! Edited May 4, 2020 by sirslayer Quote
sirslayer Posted May 4, 2020 Posted May 4, 2020 Lego Technic Porsche 959 chassis and PSK (wip) by victormendoza_jr, on Flickr here is an example, the front and rear diff is on it own dual clutches, the pair separate from each other Quote
Saberwing40k Posted May 5, 2020 Posted May 5, 2020 That's... That's not really how this works. Sirslayer's design works well, for a small, manual model, but such principles would not work for a motorized model, particularly a high speed one. As a matter of fact, this setup would be terrible for a motorized model as an axle differential, because both clutches could slip, eating power. Your solution would be especially bad because of the fact that one wheel is always connected to the motor, whereas the other wheel is clutched, meaning that one wheel can slip, while the other one can't. Good luck driving that thing straight. Now, what a differential is supposed to do is average the speed of the two outputs, based on friction. Because of this, when one wheel slows down, the other speeds up. As long as both wheels have traction, you can not lose power, unlike with a clutch. There is a very good reason nobody uses this setup. Now, if you want to avoid gear slip, there are many ways to do this, including the new 28z or old 24z diffs, and using spur instead of bevel gears. That would make any connection much easier, especially if you use an RC motor. Quote
sirslayer Posted May 6, 2020 Posted May 6, 2020 (edited) @Saberwing40k The model is designed for pushing and rolling. (ie the front tire hits bump (slows down front axle) since you're a pushing the model, with a transmission onboard, the output axles needs to gear down (the 8t to 24t) ( otherwise the transmission./motor) would bind when pushing the contest doesn't allow to be motorized.. if I can motorized the model, switch the 8t and 24t around x 2 and you'll be good Note: differential output speed with internal co-coefficients of.(friction) and angular or constant.. so it comes down that the dual clutches would act like a limited slip diff.. and for a center diff.. limited slip is good Edited May 7, 2020 by sirslayer opps!! Quote
Recommended Posts
Join the conversation
You can post now and register later. If you have an account, sign in now to post with your account.