

fmmjqtft
-
Posts
56 -
Joined
-
Last visited
Content Type
Profiles
Forums
Gallery
Everything posted by fmmjqtft
-
Having said 7 is the maximum number, it is 'possible' to have many more than 7 using hoses instead of axles. Also, the top turntable is not necessary. Two functions can be passed through a turntable even when only 1 is in the center. The 6 other axles could be supported at the top, and some 2L beams could keep the axles at the correct spacing. Axle joiners could also be used between the turntables. I know, it still won't work!
-
It is possible with up to 7 functions: Here is a view of the 8t gears and axles. The red pieces rotate individually. The blue pieces are stationary with respect to the superstructure. BlueShinyApple's solution may have been similar.
-
Speed IR controller
fmmjqtft replied to Matt The Tuba Guy's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
The speed controller is absolutely useless. Its worst fault is that it has no way of 'queuing' the signals, meaning that if you turn the dial too quickly, the controller will only send the first bits of each signal. The speed you have to turn the dial to see this effect is actually pretty slow. -
Have you seen this? It uses a similar modification but without the top bit cut off: The pivot point probably should have been moved using these parts:
-
Lego PF-No Batteries
fmmjqtft replied to Stank's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
It can damage the motor, but it depends on how fast you turn it and how loaded the other motor is. Once I made a custom Lego motor using the motor from a 14.4v drill, then connected it to one of my modified PF XL motors: (pictures of the modified XL motor) The coils in the PF XL core broke and went everywhere - but nothing else. Even the modified PF XL gearbox remained intact. I have tried many other arrangements just using PF elements and only this one damaged a motor. ps. I have used the 14.4v drill motor for other things and it generally melts gears/axles/axle holes unless a very low-pw pwm signal is used. I might try using it again but gear down using metal pieces. -
8070 Supercar
fmmjqtft replied to BrickWild's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
My mistake, older Technic sets only used 1 U-joint + a CV joint, but this does not 'work perfectly'. It is unrealistic. The output of bent a U-joint does not spin at a constant speed with the input (unless two are coupled and are both bent at the same angle). So Lego have made a new CV joint to be more realistic. Anyway, from the new pictures, it seems I am right. -
8070 Supercar
fmmjqtft replied to BrickWild's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
I think all 4 CV-joints and the 2 new pieces are used on the rear axle. Older technic sets used 2 U-joints joined together to form a CV-joint. This set is RWD, so would require 4 U-joints (two for each wheel). There are only 2 U-joints in the inventory, so the new pieces must be used instead. -
pueumatic 8043 excavator
fmmjqtft replied to Alasdair Ryan's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
I know pneumatics and hydraulics are very similar, but there is one obvious difference that affects how pneumatics need to be controlled in order to maintain a fixed position. Air can be compressed but liquids practically can't. In a simple pneumatic set up, like Sariel's pneumatic auto-valve, a hydraulic equivalent under varied load would move more like a linear actuator. If 1 motor per function is used, and there is no attempt to monitor the position of the pneumatic cylinder to keep it moving at a constant speed (or slower if the load is too high), I slightly prefer the use of LAs because they move in a more realistic manner. Of course, if the aim is to accurately reproduce the mechanisms in a real machine, 1 motor per function should not be used but pneumatics should. -
pueumatic 8043 excavator
fmmjqtft replied to Alasdair Ryan's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Yes, I meant their movements, not their physical structure or the mechanisms which control them. If one motor drives one pump which is connected to one hydraulic cylinder, the movement will more closely resemble the movement of a LA. Before I was actually replying to allanp's previous comment on the realism of the LA's movements - but I forgot to quote. My claim sure sounded funny out of context. -
pueumatic 8043 excavator
fmmjqtft replied to Alasdair Ryan's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Pneumatics are not realistic. Mechanical actuators are actually much more similar to hydraulics than pneumatics are. I mean the way they can be controlled, not the physical structure. Hydraulics and LAs are just way easier control than pneumatics. -
http://technicbricks.blogspot.com/2009/11/week-techvideo-2009-46-just-want-some.html
-
The source of the 8081 rumour is http://www.bricklink.co.za/LEGOShop/product.php?id_product=8081
-
http://www.bricklink.co.za/LEGOShop/product.php?id_product=8081 If I could choose next year's flagship it would be a 4WD farm tractor with new wheels (the same width as the power puller wheel but 1.5-2x as tall) - and new pneumatic parts, preferably grey this time to fit with the PF system.
-
The modification makes the motor 6x as fast. The stage of planetary gearing which is modified is the one furthest from the motor. The three modified planet gears are glued onto the orange piece, and the orange sun gear goes between these three modified gears and then more glue is applied between the teeth of the sun gear. I originally did this modification because I needed two very fast motors, but did not want to buy the RC motors, mainly because of their inconvenient shape. If there is any question as to how strong this modification is, I did this to 2 PF XL motors 2 years ago and they have not broken.
-
power funktions on 11,1v!
fmmjqtft replied to rien's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
The risk of damaging the IR receivers decreases as the battery discharges (the voltage drops). By now, the battery is probably at less than 10.5v, even when there is no current. Your 'best' chance of damaging the receivers would be to recharge the battery, then turn a loaded motor on then off very suddenly a few times (if the motors are constantly running, the voltage will easily drop to under 10.5v). Could you measure the voltage of the battery when it is fully charged with no motors attached? -
power funktions on 11,1v!
fmmjqtft replied to rien's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
I did not know that, but this might be the maximum voltage when there is a few 100 mA of current, but in this case the supply voltage might drop from 11.1v to something below 10.5v. When there is no current, 11.1v might not cause any damage (just guessing). Having said that, it also mentions 'Allowable operating ranges', where it says 9v is the maximum . I agree that connecting PF receivers to 11.1v is not a great idea. The motors should be able to handle 11.1v as long as they are not under very heavy loads. -
power funktions on 11,1v!
fmmjqtft replied to rien's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
@JopieK There may be some initial ohmic resistance, but this can practically be ignored unless the motor is nearly stalled. @rien Adding oil will decrease load, and therefore decrease current, not resistance. It is perfectly safe to connect PF motors to 11.1v, just don't stall them. When stalled, the heating could rise to (11.1/9)^2 = 1.5x the heating caused by a 9v supply. The difference in heating is less considerable when the motors are not under heavy loads. -
I google translated the B-models: 8065 - pick-up truck 8066 - buggy 8067 - tow truck 8068 - emergency helicopter 8069 - timber transport vehicle Can someone who speaks dutch go to the website and confirm these?
-
Don't forget the official box images: Notice that pages 'http://www.superspeelgoed.nl/images/8070.jpg' and 'http://www.superspeelgoed.nl/images/8070.jpg' do exist, instead of returning a '404 Not found error'. There is a question mark instead, so the images will probably arrive soon!
-
idea for PF S motor
fmmjqtft replied to Zerobricks's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Mindsensors should really start producing PF devices. There is plenty of stuff for the NXT platform, but NXT elements, especially NXT motors, are sometimes too bulky for integrating into Technic MOCs. On mindsensors.com it says: "If you need something extra-ordinary, do let us know and we will consider developing it, like we have done for some of our customers in the past." -
A truck
fmmjqtft replied to GuiliuG's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
The truck is good, but I'm afraid the new IR controller is horrible. It uses the 'increase', 'decrease' and 'brake' commands, and therefore only sends a signal when you want to change the speed in some way. This serves to make the controller less reliable, but the really bad thing here is that the IR controller has no 'queuing' system, meaning that if you rotate the dial too fast, the controller sends incomplete signals. -
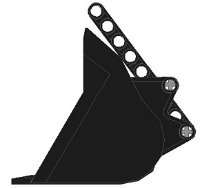
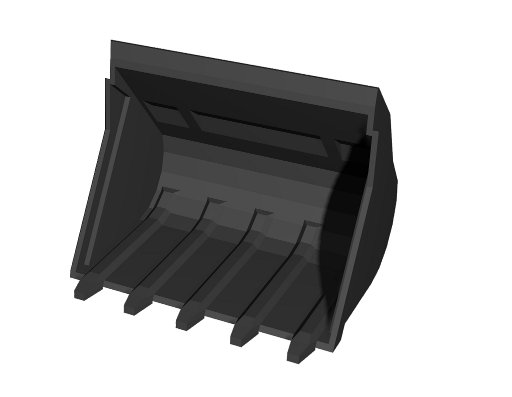
I think both those buckets are too small. If the loader bucket from 8294 is to be used, the pivot point should be moved closer to the top of the bucket. I have done this to the ldraw part: It is however, still a loader bucket. 9L beams can be attached like this, to turn it into an excavator bucket:

-
The sound and scrollbar do not work! They seem to have used Lego Movie Player v.2.10.01 instead of v.2.08
-
Inside the new LA
fmmjqtft replied to fmmjqtft's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
This could be tested by trying the old LA's screw inside the new LA's sleeve (which has grease). Unfortunately, this would require destroying yet another new LA for the sleeve. -
Inside the new LA
fmmjqtft replied to fmmjqtft's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
If the linear actuator behaved like a pair of line segments joined together at one end, this would be true. However, after testing, it is clear that as load is applied, the linear actuator is forced straight, because the distance between the two ends of the LA is shortest then the LA is straight (unlike a pair of line segments, which gets longer as it straightens). Although some friction is generated at the 'pins' at each end, which creates a moment which bends the LA, I have not yet seen a case where this is enough to overcome the straightening caused by the LA's geometry (which is not a pair of line segments).