

Slewentogzz
-
Posts
11 -
Joined
-
Last visited
Content Type
Profiles
Forums
Gallery
Everything posted by Slewentogzz
-
 This was a great contest, and the first contest I participated in on Eurobricks, but certainly not the last. If someone wants an idea for a future contest: RC boat contest! I love boats... and building boats with lego is a real challange. I don't know what the winning criteria would be, maybe speed, but that will probably be hard to measure. Just an idea, and thanks to all the moderators for taking their time to make contests!
This was a great contest, and the first contest I participated in on Eurobricks, but certainly not the last. If someone wants an idea for a future contest: RC boat contest! I love boats... and building boats with lego is a real challange. I don't know what the winning criteria would be, maybe speed, but that will probably be hard to measure. Just an idea, and thanks to all the moderators for taking their time to make contests! -
For a unique design and great working mechanism, my ten points go to Wimbledoom. My six points go to a powerful flipper with the ability to self right with ease, Wheeled scorpion. 29: 10 22:6 20: 4 7: 3 19: 2 25: 1
-
The RC motor has less torque compared to the normal PF motors, but the main reason it gets stalled is because the lego batteries can't give it enough current, so the batteries automatically cuts off power when the motor is under a big load.
-
It can be strengthened, but that would give it more mass, which it can't handle with just one motor. A heavier weapon will probably work better with sbrick, as you can ramp the speed up slowly instead of going 100% instantly with the PF remote.
-
You did a really good job with yours, it's really compact. Reminds me of Ice-Wave Thanks :)
-
Yeah, I tried to make it as powerful as possible with one RC motor, but it's probably not enough. If I could redo everything, I would use more power for the weapon and make it heavier also.
-
Thanks! The bot is no good upside down :) Your bot looks really interesting too, I'm curious to see how it turns out.
-
Very low robot, I think it would be a great competitor to mine! Name suggestion: Ramprampage
-
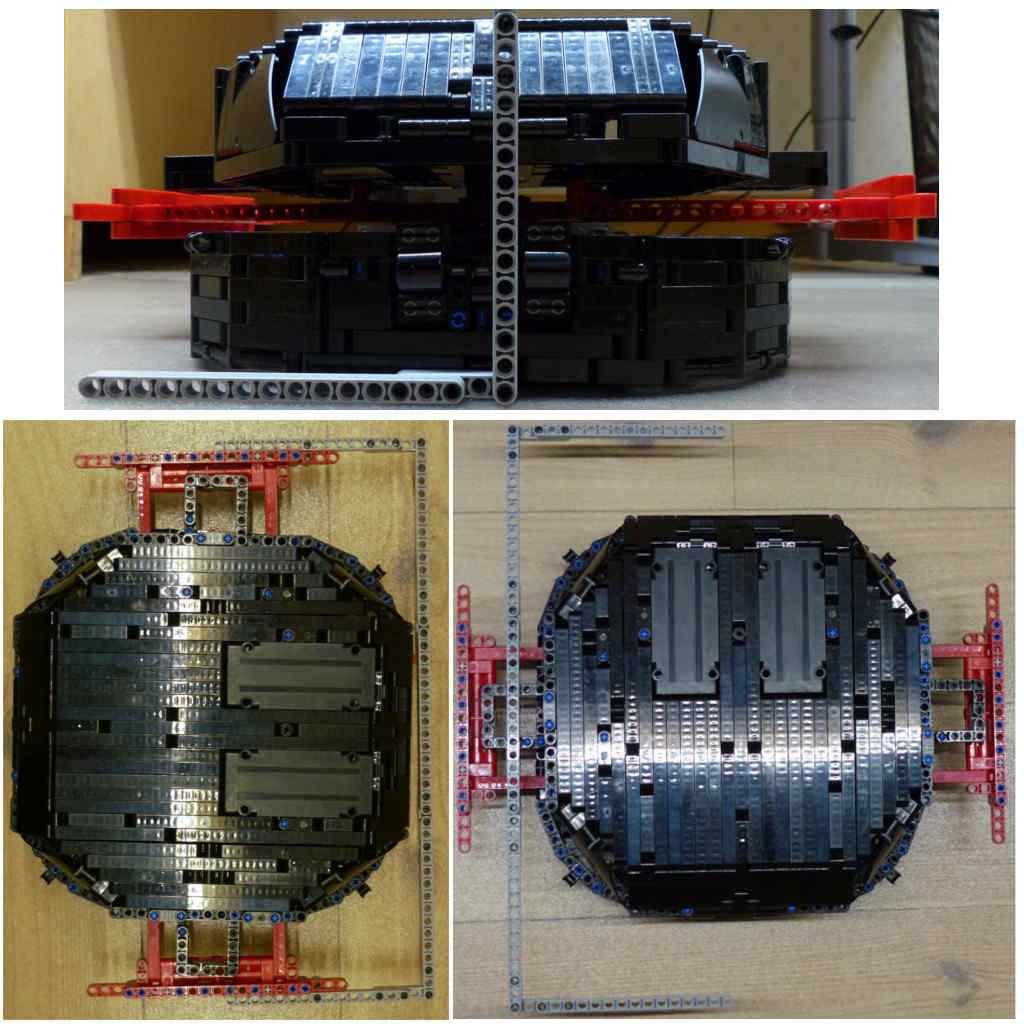
This is my entry, I call it "Blackout". Here is a bricksafe page with all WIP photos It's based around a spinner that reaches in all directions. I had some problems with the weapon being too heavy (it's powered by a geared down RC motor). I also wanted to make it driveable upside down, but it was unpractical and heavy, so I added a self-righting mechanism instead. It's powered by two PF Large motors with one linear actuator each. The body has a design so that the robot can't get stuck on it's side, if it would get flipped. The battery boxes are powered on by special "pull buttons" to make them impossible for another robot to switch off. Look at the end of the video to see how it works.
-
4. Entry name: BLACKOUT Category B (PF IR) Signature move name: Smithereen maker (spinner) Summary of functions: High speed light-weight spinner, skid steering, self-righting mechanism I wanted to do a robot with a spinner that can reach in all directions. My plan was to mirror it around the spinner, so that the top (where the self-righter is) also had wheels, so that it could drive upside down. It turned out to be too bulky and didn't look very good, so I added a self-righting mechanism instead. I also planned to make the spinner completely round with teeth, but it got too heavy for the speed i wanted. The blade weighs a little over 100 grams and I actually calculated the rotational energy the blade has, and it's approximately 1 Joule (if you drop an apple from 1 meter, you get the same energy). The speed of the blade at the tip is 20 km/h. It has a "pull to activate battery"-mechanism, which makes it almost impossible for other robots to turn off the power, as you have to pull a small beam to power it off (look at the end of the video). It also has a special shape to make it impossible to balance on it's side, which means it can always self-right. The black things sticking out from the top helps with that.
-
Really cool competition! Are you allowed build a lego copy of a real battle bot?