

Sophraves
-
Posts
6 -
Joined
-
Last visited
Content Type
Profiles
Forums
Gallery
Everything posted by Sophraves
-
Hello, Thanks again for your support. I know I still need to learn a lot, so it’s time for v2.0! My previous testing showed that the bushes on the axles were sitting too close to the z24 gears. I also realized that an absolute x1/x2/x4/x8 ratio isn't practical for an RC model of this weight. I want a setup that both accelerates and reaches a high top speed while pushing the mechanical limits of the plastic. The plan is to use a block of 4 PU L motors in a cross-configuration with a 20:24 gear reduction as a seperate module. Then aiming for progressive relative steps of x2, x1.5, and x1.25 as i read somewhere this would be more ideal for 2kg on 8cm wheels (?). So I came up with this (if I get it configured at least): shaft1 24:24 with clutch1 16:24 and clutch3 24:12 (no z12 in 1st gear); shaft2 24:12 with clutch2 16:24 and clutch4 20:16. I'm sticking with the Powered Up app for now, but I expect to switch to Pybricks soon (after some learning), which will allow the use of my Spike Hub. Kind regards, Sophraves
-
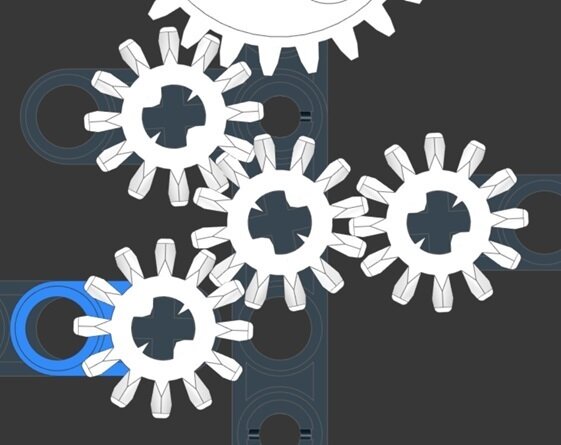
Hi gyenesvi, Thanks for the feedback — I really appreciate it. I take the practical RC constraints seriously and value the shared experience. Just to add some context: this build is about exploring engineering limits in a controlled way, not just RC efficiency. I enjoy adding complexity and pushing boundaries; functionality is why I chose Technic. Part of the motivation is simply to explore and learn by pushing systems slightly beyond the obvious use case — even if some ideas ultimately get discarded. The original 8× idea has already been tempered. At this point, I even question whether it outperforms the 4× range. Regarding the idler: I am sceptical about it and will dump it if it doesn’t serve any real purpose besides acting as a neutral gear. Regarding the 12T–12T diagonal: I fully agree it doesn’t work in a simple L-beam setup (top-left), but that’s not what I’m using here. I included a view of the theoretical backlash according to Studio; in the lower-left view you can see how far the cam actually pushes the idler. The cam’s hold position itself still has some tolerance and limited adjustment. That said, the difference compared to the standard LEGO layout on the right is small, but this extra friction could amplify at higher speeds — to be tested. The scale will likely be around 1:9 to match my 8.1cm wheels, but I haven’t committed to the bodywork yet — first priority is getting all modules and software to work. Thanks again for your input — it helps keep the experiments grounded while still leaving room to explore.
-
Hey 2GodBDGlory Thanks for the thoughtful feedback — these are exactly the points I’m trying to validate. An 8× speed increase is indeed aggressive. In practice, shifting into 4th would only happen near maximum speed in 3rd. The cam-activated idler disengages the drivetrain during shifting. The drive motors are briefly unloaded and the wheels decoupled, so no back-driven forces return into the gearbox and there’s no risk of two clutch elements engaging simultaneously under load. The idler is only engaged when a gear is fully selected. I agree this adds complexity, and it’s one of the first subsystems I’d remove if the drawbacks outweigh the benefits in testing. The timing, positioning, system response (rubber band actuation), and supporting software all need proper evaluation. You’re absolutely right about the 12T–12T mesh: while it works geometrically, friction and wear are real concerns, especially for RC use. This is one of the areas where physical testing will be decisive. On the input side, the two drive motors are currently coupled via a 20/12 ratio, but this can also be changed to 16/16 or 12/20 without major redesign. I’m keeping this flexible for post-build tuning once real-world losses are clearer. Finally, directly coupling the shifting motor is a fair suggestion. I opted for mechanical indexing and locking to ensure defined gear positions under vibration and load — especially since the idler mechanism itself benefits from precise indexing — but this choice is also open to revision if it proves unnecessary. Thanks again for the critical look — it highlights exactly the weak spots I want to test next.
-
Hey vascolp, Ty for your reaction! The control setup is conceptual, but it requires the idler gear to perform a full spin and hold position. This is more compact than a 4:1 ratio with gears, which might be better anyway to link the indexing to the idler.
-
Hi everyone, This is the drive module of a modular RC car I’m working on (uses 2 of these). The intentionally compact design pushes LEGO tolerances, so I’d appreciate some experienced eyes on the gearbox — also to help spot weaknesses or improvements. You can download the Stud.io file from my BrickLink Gallery. What it is: Pure LEGO (no modifications) 4 speeds: 1x / 2x / 4x / 8x (no z8 gears used); Compact layout; Motorized shifting with indexing; Cam-actuated Idler gear; Driven by two motors; Designed for RC use, not display-only. Things I’m aware of: long axles are used instead of bushes to reduce friction, at the cost of less lateral support; Several gear clearances are very tight; Gear pair linking in the frames is not yet optimal; Axles are not fully constrained; this longitudinal play could cause friction issues; The full model is currently digital; I’m actively checking whether physical assembly is realistic. Specific feedback I’m looking for: Better ways to connect or brace the internal structure to the main support beams; Experimental knowledge about axle length vs bush friction in high load applications; Where would flex become an issue and how would you improve frame rigidity; Any red flags regarding friction, wear, or gear alignment in real RC use; Would you build this as-is? If not: what would you change, and why? Reliability matters! I look forward to honest, well-founded criticism - this gearbox is meant to be used, not to look nice. I will update this thread as soon as the missing parts arrive for physical testing — can’t wait to see it in action! Many thanks in advance! Sophraves
-
Practise Posting Here!
Sophraves replied to Pandora's topic in New Member Section - PLEASE READ BEFORE STARTING!
test -
Hi everyone, Lego has been an interest since childhood, with a focus on Technic over the past few years. My current goal is to design a functional, performance-oriented, modular Technic RC car using only standard LEGO parts. Along the way I do tend to give myself some extra constraints and “requirements of the moment”, which is half the fun. Mechanics and building techniques are what really draw me in, especially compact, functional, or ingenious solutions that are meant to work rather than just look good. I joined Eurobricks to learn from others, exchange ideas, and get constructive feedback from experienced builders. Thanks for having me! Sophraves