

slungshot
-
Posts
5 -
Joined
-
Last visited


-
 I have my model built in LDCad and when I try to make instructions in LPub3D I get these errors. Any ideas on how to resolve these issues?
I have my model built in LDCad and when I try to make instructions in LPub3D I get these errors. Any ideas on how to resolve these issues?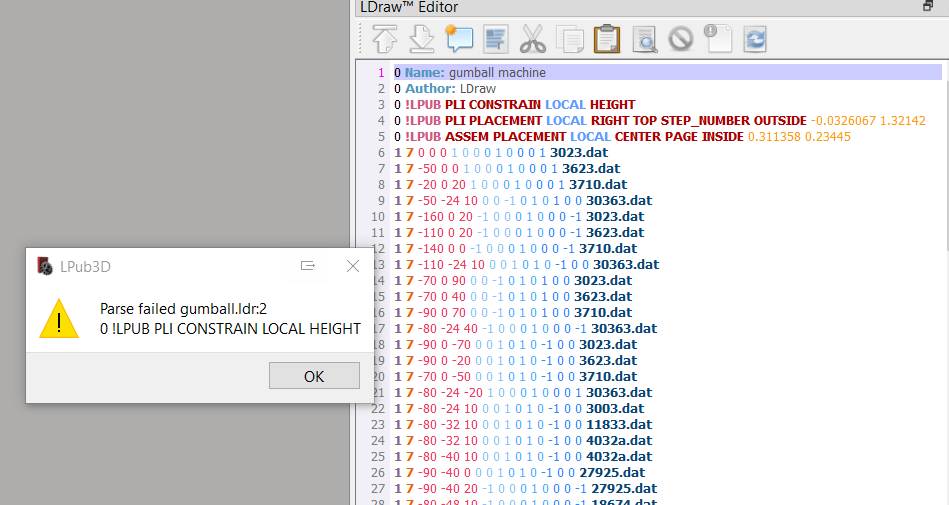
-
Efferman's Custom Parts
slungshot replied to efferman's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Ive been working on a BL USC Bat-pod and I wondered if there would be a way to design the Hero Factory Shield with handle for clip piece. -
Uses for differentials
slungshot replied to aminnich's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
I have used a Differential in a robotics competition before, we were limited to 3 motors so 2 for drive and steering then one left for a robotic arm. I used a differential for the one motor to turn it into two outputs, the first part was a hand that grabbed the item( we were picking up trash for the challenge) and then when the hand was fully closed, the power through the differential locked and the other output started to lift the arm up. (This is similar to when a truck gets one wheel stuck in a ditch and the other wheel freely spins) So the differential allowed for a grab and lift movement with one motor, then to put the item back down, the motor went in reverse and the hand opened dropping the item, and once the hand was fully open the arm lowered itself. -
twoofive's mods and mocs
slungshot replied to twoofive's topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
All the extended mods look great. -
Hi all, I was looking at the new themes that came out this year other than Technic and I looked into the Nexo Knights. When further looking into this theme I saw that there are many Technic elements in these sets and it got me thinking on how Lego introduces Technic sets into younger kids. Going from the bricks but slowly introducing Technic pieces into the sets, allowing the kids( or adults) to learn about a more advanced building system. This got me thinking and wondering how everyone went from the classic bricks into a more advanced system of Legos. For me it was Exo-Force that did the transitioning between bricks to Technic pieces, and later that year when 8275 came out Technic had taken over and got me hooked to where I am today.