Search the Community
Showing results for tags 'tc11'.
Found 17 results
-

[TC11] Wheeled Scorpion
PKW posted a topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Hi all, i've finally started my tc11 entry, i was playing around some building techniques i've improved on all my project and i initially wanted to build a robot with a razer like drive (omniwheel at the back and normal wheels at the front) but i found that drive inefficient and with a lot of friction, so i decided to built the "most compact 4x4 rubber-band powered flipper + lifter combo " and i'm not sure how it will end, but i came up with a concept chassis (it has working drive and lifting wedglets and it comes from the first idea of my entry (a sliding disk bot, but there are too many spinners here)), the problem is that i need to fit there the reloading motor (XL) the battery box and the two receivers/sbrick and i'm not sure i can (mainly because i've built a lot of compact robots and there were a lot more space than in this one) so i may came back to design a more efficent 4wd omni+standard drive and have a bigger footprint but i'm not sure, meanwhile (i'm currently building the mechanisms) enjoy the concept: drive: 2 XL motors, 4WD with friction gears main weapon: rubber-band powered flipper v2 (hoping for 2hg flipping, before it was ~1) reloaded by and xl motor secobndary weapon: lifting wedglets powered by and M motor (no electronics here) current size: 26x27 stud, with retracted weapon(battle position) -
 TECHNIC BATTLE BOT CONTEST RESULTS ATTENTION: Because we have two categories and a raffle prize, these are not the prize winners. These are the three medal winners in this contest! Congratulations!! 1st maximum impact by shadow_elenter Entry Topic - Discussion Topic 2nd Wheeled Scorpion by PKW Entry Topic - Discussion Topic 3rd Powerspin by Rennuh Entry Topic - Discussion Topic PRIZE WINNERS The first, second and third prize will be handed out to the highest ranking SBrick contestant, the highest ranking PF contestant and the raffle winner (in this particular order)! The first and second prize winners happen to be the gold and silver medal winners in the contest. The raffle winner is krtwood! Congratulations and thanks for participating. You will be contacted soon via PM to handle your prize. 1. maximum impact by shadow_elenter - SBRICK2. Wheeled Scorpion by PKW - POWER FUNCTIONS3. Regicide by krtwood - RAFFLECONTEST RESULTS1. maximum impact by shadow_elenter - 178 Points (28 votes, entry 15)2. Wheeled Scorpion by PKW - 117 Points (20 votes, entry 22)3. Powerspin by Rennuh - 103 Points (25 votes, entry 20)4. Square pancake by Zero (Zblj) - 97 Points (19 votes, entry 23)5. Bison by agrof - 92 Points (18 votes, entry 9)6. Wimbledoom by Erik Leppen - 82 Points (20 votes, entry 29)7. Regicide by krtwood - 73 Points (18 votes, entry 3)8. Thumper by heyitsdisty - 61 Points (13 votes, entry 25)9. Son of Whyachi by braker23 - 51 Points (14 votes, entry 7)10. The Mould by Eddie_Young - 47 Points (13 votes, entry 18)11. Son of Aminnich by aminnich - 44 Points (11 votes, entry 1)12. The Blacksmith by Marxpek - 44 Points (10 votes, entry 21)13. Black Egyptian by romashkaman - 41 Points (14 votes, entry 13)14. Blackout by Slewentogzz - 40 Points (12 votes, entry 4)15. The Mammoth by luukietechnic - 32 Points (8 votes, entry 16)16. Monsta by LXF - 30 Points (6 votes, entry 24)17. The Reaper by Offroadcreat1ons - 30 Points (8 votes, entry 10)18. Mr Cuddles by JTS - 23 Points (8 votes, entry 30)19. Bucket Wheel Terminator by paave - 22 Points (6 votes, entry 11)20. Iron-Slammer-Alpha by roppie11 - 20 Points (6 votes, entry 14)21. HammerAxer by cyberdyne systems - 19 Points (4 votes, entry 17)22. Harvester of Sorrow by pangniadek - 14 Points (4 votes, entry 27)23. La Grange 3001 by teos - 13 Points (4 votes, entry 26)24. Devil's Tongue by AVCampos - 7 Points (3 votes, entry 31)25. Fire Fighter by nick97 - 5 Points (2 votes, entry 8)26. Wave of Wrath by msk6003 - 5 Points (2 votes, entry 19)27. Nibbler by Seasider - 4 Points (1 votes, entry 12)28. Razor II by Burko-uk - 2 Points (1 votes, entry 5)29. Lancelot by TimberBrick - 2 Points (1 votes, entry 6)30. Claw-Crawler by The Vooduist - 2 Points (1 votes, entry 32)31. Deathclaw by Wilbero79 - 0 Points (0 votes, entry 28)32. destructobox v5.2 by Aventador2004 - 0 Points (0 votes, entry 2)
TECHNIC BATTLE BOT CONTEST RESULTS ATTENTION: Because we have two categories and a raffle prize, these are not the prize winners. These are the three medal winners in this contest! Congratulations!! 1st maximum impact by shadow_elenter Entry Topic - Discussion Topic 2nd Wheeled Scorpion by PKW Entry Topic - Discussion Topic 3rd Powerspin by Rennuh Entry Topic - Discussion Topic PRIZE WINNERS The first, second and third prize will be handed out to the highest ranking SBrick contestant, the highest ranking PF contestant and the raffle winner (in this particular order)! The first and second prize winners happen to be the gold and silver medal winners in the contest. The raffle winner is krtwood! Congratulations and thanks for participating. You will be contacted soon via PM to handle your prize. 1. maximum impact by shadow_elenter - SBRICK2. Wheeled Scorpion by PKW - POWER FUNCTIONS3. Regicide by krtwood - RAFFLECONTEST RESULTS1. maximum impact by shadow_elenter - 178 Points (28 votes, entry 15)2. Wheeled Scorpion by PKW - 117 Points (20 votes, entry 22)3. Powerspin by Rennuh - 103 Points (25 votes, entry 20)4. Square pancake by Zero (Zblj) - 97 Points (19 votes, entry 23)5. Bison by agrof - 92 Points (18 votes, entry 9)6. Wimbledoom by Erik Leppen - 82 Points (20 votes, entry 29)7. Regicide by krtwood - 73 Points (18 votes, entry 3)8. Thumper by heyitsdisty - 61 Points (13 votes, entry 25)9. Son of Whyachi by braker23 - 51 Points (14 votes, entry 7)10. The Mould by Eddie_Young - 47 Points (13 votes, entry 18)11. Son of Aminnich by aminnich - 44 Points (11 votes, entry 1)12. The Blacksmith by Marxpek - 44 Points (10 votes, entry 21)13. Black Egyptian by romashkaman - 41 Points (14 votes, entry 13)14. Blackout by Slewentogzz - 40 Points (12 votes, entry 4)15. The Mammoth by luukietechnic - 32 Points (8 votes, entry 16)16. Monsta by LXF - 30 Points (6 votes, entry 24)17. The Reaper by Offroadcreat1ons - 30 Points (8 votes, entry 10)18. Mr Cuddles by JTS - 23 Points (8 votes, entry 30)19. Bucket Wheel Terminator by paave - 22 Points (6 votes, entry 11)20. Iron-Slammer-Alpha by roppie11 - 20 Points (6 votes, entry 14)21. HammerAxer by cyberdyne systems - 19 Points (4 votes, entry 17)22. Harvester of Sorrow by pangniadek - 14 Points (4 votes, entry 27)23. La Grange 3001 by teos - 13 Points (4 votes, entry 26)24. Devil's Tongue by AVCampos - 7 Points (3 votes, entry 31)25. Fire Fighter by nick97 - 5 Points (2 votes, entry 8)26. Wave of Wrath by msk6003 - 5 Points (2 votes, entry 19)27. Nibbler by Seasider - 4 Points (1 votes, entry 12)28. Razor II by Burko-uk - 2 Points (1 votes, entry 5)29. Lancelot by TimberBrick - 2 Points (1 votes, entry 6)30. Claw-Crawler by The Vooduist - 2 Points (1 votes, entry 32)31. Deathclaw by Wilbero79 - 0 Points (0 votes, entry 28)32. destructobox v5.2 by Aventador2004 - 0 Points (0 votes, entry 2) -
.thumb.jpg.050f28ccd893f68d8416233f594d9f3d.jpg)
[TC11] Maximum Impact FINISHED
shadow_elenter posted a topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
This MOC is finished and has been posted in the entry topic. CLICK HERE to skip the build log and go directly to the finished MOC info Hello builders! I decided I'd give this contest a try,and I'll be building with SBrick's. Building process is not that far yet, but something already: The signature move of this build will be a high-power ram: It's going to be a 4 wheeler, it's ram is rubber band propelled and quite powerful! The ram will not be it's only feature though. I hope you like it -

[TC11] The Reaper- COMPLETE!
offroadcreations posted a topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Updated with final model^^ Hey everyone, here's my TC11 Entry Topic... The Reaper I started my work on my contest entry the day it began. I built a chassis using red rims and the wheels from 42039. It had a giant hammer (made in LDD). https://www.bricksafe.com/files/Offroadcreations/wrath-of-mjolnir/bad-ideas..../Wrath of Mjolnir.lxf It was called the "Wrath of Mjolnir." (Mjolnir is the name of the Norse God Thor's hammer.) The chassis was much too big, so I scrapped the entire chassis built IRL. I started thinking of Ideas in my mind, the first being a half-track of sorts. 107mm Tractor tires in the front, and tracks in the back. After thinking more, I decided it would be better to just make it simple, with 4 wheels, and I built up the bodywork. I decided that the hammer was way too big, so I made 2 smaller ones. After thinking even longer and looking at other bot hammers I thought they were still too large, so I opted for a non-brick-built one instead. I remembered I had this piece, and knew it would be perfect. I also bought a bucket, because it looked good and I knew it would be prefect for trapping opponents inside. Here is what I have now, and the name was changed to The Reaper, because the piece looks like part of a scythe. The scythe is not attached yet. Also, after seeing @agrof's topic, I realized the bucket was too big for the maximum size. But I've figured out a way to move it upward into the box limitation and swivel it back down for battle mode. I still have much to do, like, Attach the scythe put the PF back in (it is in something else right now) make the bucket move fix the colors complete the bodywork So, it is definitely a WIP, but I hope to do it right and do well in this competition. Please tell me your thoughts! -

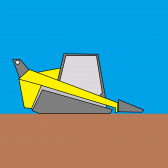
[TC11] Devil's Tongue
AVCampos posted a topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Hi all! Yesterday at 2 AM (technically it was today already) I finished my entry for the Battle Bots contest. My creation is Devil's Tongue, a wheeled vehicle with a flipper arm. Initially I intended to have spinning drums in the front for the flipping function, hence the name, inspired from Command & Conquer Tiberian Sun: I don't have the demonstration video yet (I hope I'm still on schedule by making it today when I get back from work). Anyway, I can present two WIP videos and a photo of the final product. It's a four-wheel drive vehicle, capable of driving inverted. I wanted to use PP wheels for their grip and weight to make it hard to push and flip, plus their diameter to make more room to fit stuff while keeping the inverted drive ability. However, I found out they're too heavy and grippy for the XL motors (one per pair of wheels) to drive and steer, so I had to resort to Unimog wheels. Here's the test I made with the PP wheels: I wanted to have a fast-acting flipper instead of a slow lifter, so I decided to have it spring-loaded. It uses four of the hardest short springs. To pull the arm down, I built a mechanism that winds a winch when its motor turns in one direction, and disengages it when it turns in the other. Here's a test of the flipper attached to the winch mechanism: After including the armour to avoid being stuck if flipped onto its side, it reaches exactly 45 studs in width and a little less in length. Also, as I have both my SBricks occupied in other MOCs, as well for symmetry, I used two PF IR receivers. Unfortunately, due to time constraints and to ensure line-of-sight reception, the receivers and the battery box are exposed on the rear. I guess it's a matter of never turning my back to the adversary! Here's the photo of the finished product. Astronaut not part of the crew, present for scale only. Later today I intend to make a video and take better pictures. I'm not sure about its performance and battle-worthiness, but at least (IMHO) it looks cool and functional! Whaddayathink? -
[TC11] Wimbledoom
Erik Leppen posted a topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
I guess it's time to share my works for TC11. To be honest, I started building almost on day 1, so this means I tried out a lot of things that didn't work, and that I won't show all. Anyhow. So, my first plan didn't work because it didn't fit the box (remember the diagonal question? It was a long thin design.) Secondly, I didn't want to do a spinner. A spinner seemed boring to me. I wanted to do something bit more technical. A lifter? A slammer? I built a lot of (non-functional) battlebots back in the studded age, when I was still a nerdy teen, but I don't have those photos anymore (which is a shame). A few bots I do still remember, so I chose a design from those that I always liked. The concept is this: So, it's a "horizontal dual hammer" bot. I think there are very few horizontal slammers, and I think it's cool. The original was named "Wimbledoom" because it had a flat top with some sort of a stadium with two figs and a tennis net (white fence) and some minifig audience. So let's use that as a working title for now (even though the tennis theme won't return) The idea is that there will be some sort of force built up and then released to slam the hammers forward into an enemy that's in between. The high speeds and sharp ends of the hammer will damage the enemy. Then, a slow return mechanism should bring the hammers back in their original positions. So, how to build up force? The frist thing I thought was "wprings are too weak, I want something better" and I was thinking about a flywheel approach, where a motor tries to let a wheel spin really fast and then somehow make a sudden connection with the weapon. This idea got quite far: The idea was that the orange axles move the gear racks so the green gears mesh with the red gears. If slid back, it meshes with the blue gears, which would be the return mechanism. It didn't work. It had far from enough force, and most energy was lost to the drive train anyway. I tried mechanisms with fewer gears (and using tires as gears) but they all didn't work. So I went back to the idea I originally rejected: Springs. These are all long springs I have except for some black ones from a motorbike set. As if it was meant, the dark-gray ones are half as strong as the other ones, which are about equal. Which means this is the perfect spring: As energy is distance times force, this spring, with a distance of 6 studs and a force of two 8466 springs, should store quite some energy (remember, this is the suspension from three large sets added together). So, now the hammer itself. Of course, this is a mock-up. It needs to be strengthened with plates and tiles, because, well... one particular piece didn't survive a test version... (it was already slightly damaged) OK, so I needed a mechanism to rotate the hammer about 180 degrees (preferably slightly more), and a frame to hold it. For the frame, I learned: if it needs to be strong, make it triangular. This is not exactly Pythagoras correct, because the straight sides are 7^2 + 24^2 = 625, where the diagonal is 25^2 + 1^2 = 626 (due to the 2x2 corner plates at the pointy end), but this difference is so small that noone will notice. To rotate the hammer more than 180 degrees, you can't just attach the spring to the hammer directly - you need a system of beams to amplify the motion in some way. This was a long puzzle and I eventually came up with (the red axle is where the spring will attach) The idea is that this is one half of the bot. It will eventually look like so: which gives plenty of space in the center for PF material and a drive system for some wheels. Doubling the frame gives which, as you can see, stays in place without me having to hold it, so it has an automatic locking mechanism due to the geometry of the beams (it locks over center). Moving the yellow part a little makes it blast away with quite some force. I'm happy! Dimensions of this unit so far: Width 17 (which is half, so width will be 35 or so) Depth 34 Height 8 Well within the limits. Next challenges are: fitting some drive mechanism, finding a way to trigger the mechanism, and maybe most importantly, building the return mechanism (which is where the 40t gears come in). -

[TC11] Lancelot
TimberBrick posted a topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Initial Design: Flipper armed battle bots are winning designs. I stated by designing a variable geometry flipper that maximized the available dimensions. I wanted to insert a photo here, but the forum is limiting my size to 20kb???? Battle Trials: After getting the initial design built, we battled Lancelot against other winning designs I had built. This exposed many weaknesses which I then addressed. One primary weakness was the compression strut distributing the load of the flipper arm to the front wheels. When it was loaded in tension, the pins would pop out. I discovered that I could press a flick missile pin inside the regular pin, locking it in place from withdrawal. The battle format we use is a Lego Sumo Contest: push your opponents outside a circle by any means possible. it's simple and really fun. We use a four foot circle for 1v1, and a six foot circle for 3-way and team battles. Invite: Bring your Battle Bot to next year's Bricks Cascade convention in Portland Oregon, February 2018. Final Build: Lancelot Category: A SBrick Signature Move: Power Tilt Drive: 4 XL Motors Control: Skid Steer Weapon: Variable Geometry Flipper powered by 4 XL Motors Flipper armed robots are consistent winners. See how much fun it is to Power Tilt the competition with Lancelot in the video below. This heavy 2.55 kg bot can flip far more than its own weight. The forks have substantial down pressure - ramming a zero ground clearance bot will pierce the forks underneath it. Fast flipping action and speedy maneuverability enable a skilled driver to Power Tilt rotary weapon bots before their weapons come up to speed. The system block construction is rigid and indestructible. -
Hi everyone, First off, I'll do a little introduction. Even though I've been a member for many years I've mainly just lurked in the shadows, probably because I've felt I don't have the time to build or the expertise to make a contribution. But there was something about this competition that has me really excited, and so far I've followed all of the participants closely. Then at the weekend when the first entries started being posted, I thought "what the heck, why not". So (if I manage to complete within the VERY short time frame I've allowed myself) this will be my first MOC in nearly six years and my first ever posted to this forum! I've been building for just four days now, but nevertheless, meet Mr Cuddles. The drive is already working, except I haven't worked out where the IR receivers are going yet. It is very dense and compact; a total of 15 box frames so far! The ground clearance is less that 0.5 studs to protect it from flipper bots. I eventually hope for it to have two large pincers/claws on the front, powered by the LAs, to grip the opponent. This is where the name Mr Cuddles comes from. Then when they are caught and can't escape, a hammer mounted on the top will smash them from above. Wish me luck!
-

[TC11] The Mammoth
luukietechnic posted a topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
[TC11] CAT A The Mammoth Hello! I'm back with an entry for this contest. I have created something that should like a sort of mammoth. I have still some problems to solve (more on that later) but it is almost finished. Here are some pics: The bot contains 1 sbrick, drives with two xl motors, and there are two functions: - The spear, wich is pulled back with help of a string, and a rubber band that keeps the spear on tension. I will show you some close-ups in the final video. - The tusks. These maybe look flimsy (actually they are), but the flexibility comes in very handy, because it closes around a opponent perfectly. Here is a pic of the inside: The gears under the actuator are part of the spear system. When the spear is full back, it pushes against a lever, that set the gearbox in release, and the spear can fire perfectly. When the spear is full in front, the gearbox is in pulling mode. I have made this so I can use one motor for the function. Here is another picture of the belly: Now I still have one problem. The model doesn't turn quit well. Now the model is around 1.8 kilos, it isn't easy to turn, but without the black covers it works just fine for my needs. When the covers are on, the model doesn't turn (the wheels aren't touching the covers). I'm still looking for a solution, but maybe someone does know what I have done wrong. This is it for now, I you have any questions let my know. -

[TC11] Black Egyptian [FINAL UPDATE]
romashkaman posted a topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Hello everyone! Just finished my batllebot - Black Egyptian! Before building the bot, I thought - what can inspire me? And thought came to the Egyptian pyramids - they stood for centuries, therefore, they were built very competently. The shape of the pyramid is attractive to me, so I decided to embody it in my future battlebot. All I had for this bot was a few motors, a battery box and a SBrick. I wanted the battlebot to be mobile, but it could also bring significant destructions, so I made the upper part of the pyramid detachable in order to cause powerful hits. The destructive effect of the hit is also enhanced by the fact that the entire impact force is applied to the small edge of the pyramid, and not to a large area, as in the case of a simple hammer. The robot's design is very solid, its wheels are hidden deep inside, like the power button, which is a great advantage in the combat. Specifications: Dimensions: 25 x 25 x 25 studs; Drive - 2 XL-motors; Hit mechanism - 1 M-motor; Power supply - 1 battery box; Remote control - 1 SBrick. ---------------------------------- UPDATE #1: In accordance with the recommendations of the moderators, I edited the main demonstration video (cut off the ending, the original version is still available on the Youtube channel). Also, according to the proposals of the forum members, I played with the gears in the chassis - a pair of 12- and 20-teeth gears is not reliable, but a pair of two 4-teeth is reliable enough (you can see it in the video below). The bot's speed became slightly higher. Also, at last two balls from the Mindstorms series arrived to me. I planned to use them as supports, but they lift the bot a few millimeters more than necessary, because of what the wheels just spin in the air. A more precise adjustment of these supports will take a long time and lead to a total redesign of the model. So I will not put them into the construction. UPDATE #2: I finally edited the main video and replaced the 20- and 12-teeth gears with 4-teeth gears for greater reliability and speed: ---------------------------------- -
Prologue: I must admit, I’ve never thought to be able to reveal a proper entry that soon, but all the sparks came so suddenly and all of those fitted into the concept in my head, that the first digital model was ready in 1 night. Some fine tuning was done during another night, and now it sits beside me in it’s Brick Built Beauty. Excuse me for presenting via digital pictures for now, but this way I can give You nicer overview (according to my actual skills), live pictures and video will be done, of course. As it is basically ready, I decided to share it as inspiration to the community, I hope to see many awesome and fun creatures! Let me introduce my entry for the TC11 contest: Name: Bison - my robot is chubby, robust, has lot of power to push and for butting heads, and has biungulate heels to kick all around – just like a bison. My main objectives were to use 2 motors only (for intuitive control, which is essential in the battle arena), and to build a double sided robot, which is functional upside-down as well. Also, I wanted to follow the regular MOCing rules: ease of build, BB access must be simple, legal techniques (LDD compatibility). Parameters: Skid steering 4x4 drive via friction gears Motorized kick-heels via friction gears (signature move) Massive dozer blade (? signature move ?) Very robust structure (to survive rough beating) Modular build 439 parts (without batteries) 37x26x9 studs 1070 gramms (with Ansmann rechargable batteries) 0 gears The 2995 tyre works here very well, as it is more grippy than the average LEGO tires, and so is the 55978 too, as result I got a nice combo for my friction gear set-up. This can provide quite a lot power, but also works as clutch in extreme situations (motor protection). The only deviance what I had to apply (with staff approval): to fit the 2995 tyre to the inside of the 2996 rim lip (Click for picture - on the right), so I could fit them perfectly on the wheel hubs, without building those in offset with the housing. As here can be seen, it is pretty crowded in the inside, which I am very pleased with. After some minutes of test, I am satisfied with the result, it can easily push 3 kgs (milk cans), quite fast, and really works like I imagined. Let’s get to pictures, update will come! EDIT: video is ready, see post below.
-

[TC11] Blackout Battlebot
Slewentogzz posted a topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
This is my entry, I call it "Blackout". Here is a bricksafe page with all WIP photos It's based around a spinner that reaches in all directions. I had some problems with the weapon being too heavy (it's powered by a geared down RC motor). I also wanted to make it driveable upside down, but it was unpractical and heavy, so I added a self-righting mechanism instead. It's powered by two PF Large motors with one linear actuator each. The body has a design so that the robot can't get stuck on it's side, if it would get flipped. The battery boxes are powered on by special "pull buttons" to make them impossible for another robot to switch off. Look at the end of the video to see how it works. -
Yesturday finally inspiration returned, so the thing like this came out. BeatBox - because it's like box and beats others when spins. Functions - drive and spin. Picture from top, which is also sexiest part - bottom. More details and video later.
-
[TC11] Destructobox
Aventador2004 posted a topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
i want to introduce my battle bot the destructobox. it has a spinning weapon and flipper. it is powered by 2 xl motors and as you can see the blade is driven by a m motor and flipper has a servo it is exactaly 45 studs long and 24 studs wide hope you like it besides the color splatter Vid coming soon tell me your thoughts aventador -

[TC11] Bucket Wheel Terminator
paave posted a topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
My entry for the contest is Bucket Wheel Terminator Signature move: Bucket Saw. It's powered with the Buggy Motor through the gears and a chain. Besides, it has an additional move: 'boom' lift. M-motor and a small actuator do the job. Despite the optical illusion, the boom is 44 studs long. Drive is with 2 L-motors connected directly to threads. It provides good speed and mobility. IR receivers are put in a comfortable place to control, and fixed strongly. Check out a short video demo (be careful of agressive music): Can't say the weapon is strong enough for a real action, but I liked the idea itself. -

[TC11] Fire Fighter
nick97 posted a topic in LEGO Technic, Mindstorms, Model Team and Scale Modeling
Hey all, I present to you my TC11 entry in progress It is called Fire Fighter because it has fire stickers on it It has tracks for easy drive and steering The blades at the side are for defend and as weapon. (I won't tell my signature move as it isn't build yet.) This vehicle is 45 studs long, 29 studs wide(without blades) and about 16 studs high. As for the discussion about the size, I find my vehicle quite big. So 45x45x45 is big enough to me -
Let's start of showing you where I'm at now, then we'll talk about where I was and why that didn't work. The weapon is a horizontal spinner, driven directly by two XL motors, with two loaded battery boxes in the blade. I tried a couple variations of using belts and clutch gears to protect the motors but none of that really worked. Ultimately it's remote controlled so the driver is the clutch gear, I suppose. Because the spinner is fairly high off the ground, higher than I figure many of the other bots will be, I needed some way to reach out and touch those little guys. I was originally thinking of doing a retractable ramp that would extend out from the middle of the bot and force them up into the spinner. Then I decided to use linear actuators at the back and pivot the whole superstructure down. At maximum lift the blade gets within 4L of the ground. This approach sacrifices a lot of rigidity of the superstructure. Well, it's still rigid, but it is not solidly connected to the body. This means some of the impact when the spinner connects is going to be lost, but I like the idea of being able to target specific heights on the other bot. I think it's a worthy trade-off. When at max lift the bottom front edge of the superstructure rests on the top front of the base to help with this, as well as a lot of bracing on the vertical guides on either side of the superstructure. A side effect is that the superstructure is easily detached from the base with the removal of two pins, two 3L thin liftarms, and one electrical connection. I originally intended all the RC receivers to be in the back of the superstructure but once I added the lifting feature that would have required a ridiculous number of extension cables that I don't have. So I put one on either side of the base and tried to make it not look too out of place. The long panels unfortunately can't be any higher without getting brushed by the spinner. Drive is two L motors through worm gears, so it's not a speedy bot. The three wheel design with a lot of the weight on the third wheel almost directly under the center of the spinner makes it able to rotate almost in place. The plan is keep the other bot in front of you and let them come to you. It just has to be able to spin faster than they can drive around. Lift mechanism is an M motor. The base is pretty solid other than a few decorative fill in pieces. Battery boxes are integral but you can replace the batteries just by removing the black 15L liftarms on the top. Now we come to my tale of woe. The bot's name was supposed to be "The King". Bricklinked a bunch of 3L axles and yellow half bushes to make its crown. Two sets of inverted tracks mounted on springs to soften any blows. The King was quite proud of his sapphire in its bezel. The color cast by the dark trans blue on the yellow was the inspiration for using bright green on the base. There was just one slight problem once all the pieces came in and the crown was complete. Too much weight on the turntables. I guess I should have known. I tried running a liftarm inside the two turntables to support weight very early on in the build but that actually made it much worse. Anyway, without any complex drivetrain to protect the crown was much bigger than it needed to be and kind of pointless so its not the end of the world. It had personality though. So I changed the name to Regicide because The King is dead. Now I have to come up with something much lighter to make the top look finished. I'm not sure if I will even keep the yellow circle. Getting rid of all that would bring the weight down a lot and speed up the spinner. I have a bunch of the shorter bright green panels I could do something with. Oh, it was 45x45x40 with the crown. Now I think it's around 45x40x32.


