Search the Community
Showing results for tags 'snack'.
Found 2 results
-
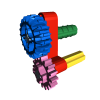 My new MOC is probably the weirdest Lego Technic car (I) ever uploaded- it is made to be invisible and to work autonomously. Its use case is based on the fact that at a party, you never really get the snack you want without interrupting talks of others. My solution is a small robot that follows the edge of the snack table while carrying the snack tray(s). That is where the name comes from, it 'races trays' around the table and I liked the software-origined word 'Raytracer' a lot. For the same reason why a car exists with the name 'Interceptor'. I have done some exploring in this area, a few years ago TrayRacer 1.0 was published. But it could only follow rounded tables. And that got me thinking: can you build a Lego Thing that is able to understand when there's a corner coming up? The first answer was 'no'. It was never done before and I couldn't think of any way. The second answer was 'Well, for the intended size, you will need a mechanical sensor and a mechanical 'brain' that is able to translate the 'mechanical sensor data' into 'Let's start a steering action NOW'. That's a lot of quotes, how to convert this into hard plastic bricks? After a lot of thinking, tinkering and tuning TrayRacer 2.0 was born. It is really hard when you throw the remote out of the door, to make the robot think for itself without using the convenient Mindstorms sensors. TrayRacer 2.0 uses only a single PF M motor and is full mechanic Lego Technic. There's an important reason why I only used an M-motor: power consumption. A nice robot system with a lot of sensors and actuators will be always empty as the testing is done and the party is starting. A simple rechargeable battery box with a PF M motor is small and reliable. I added PF navigation lights because it looks good in the dark, which looks good on the party. The new TrayRacer 2.0 is 4 studs high, exposing the 4-stud batterybox as a load on the back. This had to be accepted as I needed the speed control: you HAVE to be able to set the 'feeding speed' on parties otherwise people eat way too much. In other cases, maybe an old battery would have been a solution. [As a sidenote: with the new Lego Technic electronic systems coming up, I don't see battery boxes and motors becoming any smaller. This is a bad development that TLG should be aware of. ] High quality photos (Brickshelf files not yet public, so direct links:) 1 2 3 4 5 6 7 8 The video explains it all: The deep technical details- a dynamic system Usually, 'mechanical sensor data' is fed into a clutch/driving ring or a differential, which means the device using the data also influences it. The 'mechanical imput impedance' is too low (This robot is built using mostly electronic engineering concepts..). In the RayTracer 2.0, this effect is visible in the sensor wheel. It takes some effort to shift the driving ring, which means the rubber band needs to be stronger. As said in the video, the sensor wheel needs to be pressed to the RIGHT (so robot pressed LEFT) for straight driving, which is harder when the rubber band is stronger. Because the robot is very light (lithium battery, no big electric components) a stronger rubber band means it needs to push harder to the LEFT, which is only possible when its rotational inertia is higher, so then it needs to be heavier. But weight kills power consumption. A lower weight causes oscillations, as the robot slams to the left using its inertia after a succesful steering action - enabling straight driving- , then the rubber band springs back because the robot is not able to press hard enough to the left continuously- enabling the left wheel brake again-. When the rubber band is too strong, it oscillates forever, when it is just a little too strong, the robot is designed to reach a stable orientation in a few oscillations. In the video this effect is sometimes visible, you can see different dynamics with its bodywork removed! Also, as you can see, the sensor wheel is on a long lever. The lever enables tuning of the force needed to press it to the RIGHT, thus for tuning it together with the rubber band system. To summarize: because the 'mechanical information' is influenced by its 'processor', there is a fine optimum in rubber band strenght vs sensor wheel lever length vs overall robot weight. For this reason, I could give you instructions, but there's no guarantee that any reproduction would work. Any axle that is a tiny little bent, any driving ring with some small damage, even the friction of individual pins, these are all factors that influence the final tuning and need to be optimized. Instructionless building with Lego Technic is not only a unique combination of parts, it's also the way it's built and tuned that makes it a final product. Some quick photos:
My new MOC is probably the weirdest Lego Technic car (I) ever uploaded- it is made to be invisible and to work autonomously. Its use case is based on the fact that at a party, you never really get the snack you want without interrupting talks of others. My solution is a small robot that follows the edge of the snack table while carrying the snack tray(s). That is where the name comes from, it 'races trays' around the table and I liked the software-origined word 'Raytracer' a lot. For the same reason why a car exists with the name 'Interceptor'. I have done some exploring in this area, a few years ago TrayRacer 1.0 was published. But it could only follow rounded tables. And that got me thinking: can you build a Lego Thing that is able to understand when there's a corner coming up? The first answer was 'no'. It was never done before and I couldn't think of any way. The second answer was 'Well, for the intended size, you will need a mechanical sensor and a mechanical 'brain' that is able to translate the 'mechanical sensor data' into 'Let's start a steering action NOW'. That's a lot of quotes, how to convert this into hard plastic bricks? After a lot of thinking, tinkering and tuning TrayRacer 2.0 was born. It is really hard when you throw the remote out of the door, to make the robot think for itself without using the convenient Mindstorms sensors. TrayRacer 2.0 uses only a single PF M motor and is full mechanic Lego Technic. There's an important reason why I only used an M-motor: power consumption. A nice robot system with a lot of sensors and actuators will be always empty as the testing is done and the party is starting. A simple rechargeable battery box with a PF M motor is small and reliable. I added PF navigation lights because it looks good in the dark, which looks good on the party. The new TrayRacer 2.0 is 4 studs high, exposing the 4-stud batterybox as a load on the back. This had to be accepted as I needed the speed control: you HAVE to be able to set the 'feeding speed' on parties otherwise people eat way too much. In other cases, maybe an old battery would have been a solution. [As a sidenote: with the new Lego Technic electronic systems coming up, I don't see battery boxes and motors becoming any smaller. This is a bad development that TLG should be aware of. ] High quality photos (Brickshelf files not yet public, so direct links:) 1 2 3 4 5 6 7 8 The video explains it all: The deep technical details- a dynamic system Usually, 'mechanical sensor data' is fed into a clutch/driving ring or a differential, which means the device using the data also influences it. The 'mechanical imput impedance' is too low (This robot is built using mostly electronic engineering concepts..). In the RayTracer 2.0, this effect is visible in the sensor wheel. It takes some effort to shift the driving ring, which means the rubber band needs to be stronger. As said in the video, the sensor wheel needs to be pressed to the RIGHT (so robot pressed LEFT) for straight driving, which is harder when the rubber band is stronger. Because the robot is very light (lithium battery, no big electric components) a stronger rubber band means it needs to push harder to the LEFT, which is only possible when its rotational inertia is higher, so then it needs to be heavier. But weight kills power consumption. A lower weight causes oscillations, as the robot slams to the left using its inertia after a succesful steering action - enabling straight driving- , then the rubber band springs back because the robot is not able to press hard enough to the left continuously- enabling the left wheel brake again-. When the rubber band is too strong, it oscillates forever, when it is just a little too strong, the robot is designed to reach a stable orientation in a few oscillations. In the video this effect is sometimes visible, you can see different dynamics with its bodywork removed! Also, as you can see, the sensor wheel is on a long lever. The lever enables tuning of the force needed to press it to the RIGHT, thus for tuning it together with the rubber band system. To summarize: because the 'mechanical information' is influenced by its 'processor', there is a fine optimum in rubber band strenght vs sensor wheel lever length vs overall robot weight. For this reason, I could give you instructions, but there's no guarantee that any reproduction would work. Any axle that is a tiny little bent, any driving ring with some small damage, even the friction of individual pins, these are all factors that influence the final tuning and need to be optimized. Instructionless building with Lego Technic is not only a unique combination of parts, it's also the way it's built and tuned that makes it a final product. Some quick photos: -
Hi! The life in big cities is impossible without snack bars. We can find them everywhere! They mean the only one choice for the running and hurrying people to get some food and drink quickly during that very short period of the day when they have a break. Well, this kind of foods and drinks are not the best for our health. Fortunately not every snack bar is bad. For example in my version if someone wants to eat something healthy and delicious, he or she can find it in the menu! Hope you find your favourite food here, and you leave a nice feedback in the visitors’ book! My favourite is the microwave oven and the hamburger tower! „The pizza is ready!” „The fish is ready!” „The chicken is ready!” „The two hamburgers are ready!” ’The hrr krhhh…. The loudspeaker is absolutely necessary. I’m sure, that the employee would get a massive sore throat at the beginning of the day without it! Someone pays, the lady puts the order into the computer, it appears on the central screen, the chef and the other workers look at it and they know what the next order is. The back is very lifelike, too! Empty bins and boxes, air-conditioner, vent hood, big and small trashes and a dog, who hopes to find something… and a lot of insects because of the food. The building has some interesting building techniques. I’m proud of the windows, they are doors after a rotation by 90°. I like it that the white frames are 3D, they leave the plane of the wall. The picture shows, what I put behind the tiles around the window. Look at the windowsills, too. I used offset plates under 2x2 tiles, 1x2 tiles can solve it without that plates. More pictures on Mocpages! Thanks for watching! :) Enjoy your meal!
